Arbiter¶
GPIO¶
In this window, each individual GPIO (General Purpose Input/Output) behavior can be configured:
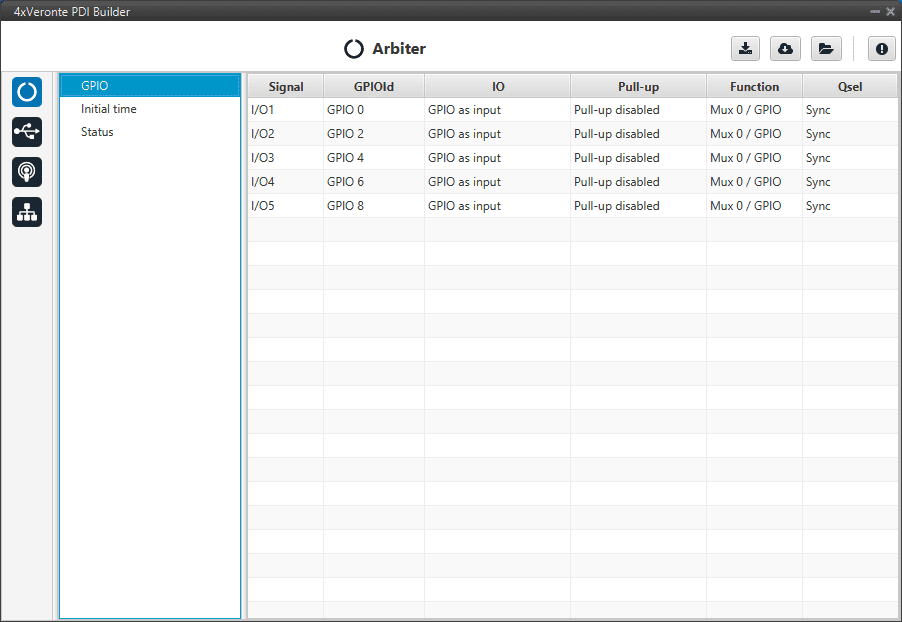
GPIO section¶
Signal: Pin ID as described in Hardware installation -> Arbiter connector pinout of the Autopilot 4x user manual.
GPIOId: GPIO ID of the microcontroller.
IO: Define GPIO as an input or ouput.
Pull-up: Enable or disable the pull-up resistance.
Function: Mux 0/GPIO, Mux 1, Mux 2 or Mux 3. These are the different functionalities that the GPIO can have, depending on the multiplexer.
Qsel: This is the “input qualification”, it is used to control how the value of a GPIO is evaluated. The available options are:
Sync: The value is taken as the time it is checked (synchronously). This is the default mode of all GPIO pins.
3 Samples: The value is checked 3 times and the value is only changed when the 3 times are the same.
6 Samples: Same as 3 samples, but checking 6 times instead of 3.
ASync: No checks are performed. It is used when it is not used as GPIO.
Initial Time¶
If any Autopilot 1x has not power supply, the Arbiter will detect it as a fault. The Initial Time parameter is the margin of time from the moment when the Arbiter is powered up until it starts cheking power supplies.
With this parameter it is possible to connect each 1x one by one after the Arbiter.
Initial Time section¶
Status¶
Enable VCP Status Message: enables the periodic sending of the status message that Veronte Link uses to recognise the Arbiter.
Period: establishes the desired period to send repeatedly the status message.
Note
VCP is the Veronte Communication Protocol. To know more, read the VCP user manual.
Status section¶