Tracking Operation¶
Tracking Operation
In order to activate the tracking, the user must follow some steps.
First of all, it is necessary to configure the Tracker (Veronte Ground) position on the map. To do this it is sufficient to go in the Veronte Ground Panel, open the Run Task and then the Command Position window.
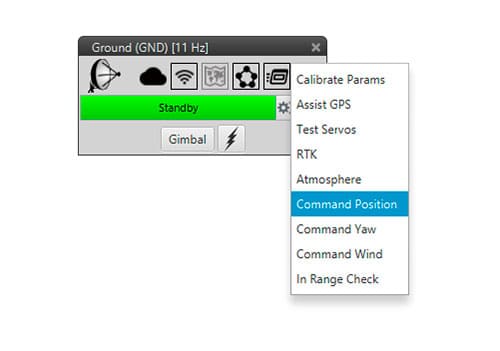
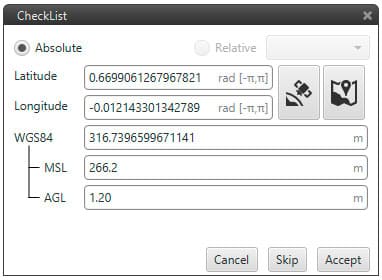
Tracker Position configuration
In this panel, it is necessary to insert the tracker position. The user can perform this action inserting Latitude and Longitude values manually or directly clicking on the Map location. The tracker altitude has to be defined too: normally, the tracker tripod is set at 1.20/1.40 [m] so this value has to be inserted in the AGL altitude.
Introduce Yaw initial orientation of the tracker. Go into Veronte Ground Panel, open the Run Task and then select Command Yaw.
Tracker Orientation configuration
When Veronte Tracker is completely positioned, it is possible to activate the tracking. To do this it is necessary to add a Gimbal widget on the Workspace.
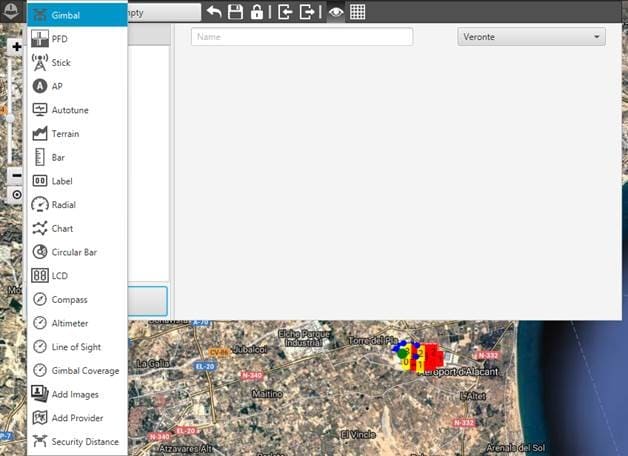
Workspace: Gimbal
Select the Payload as the one in the Veronte Ground Devices configuration.
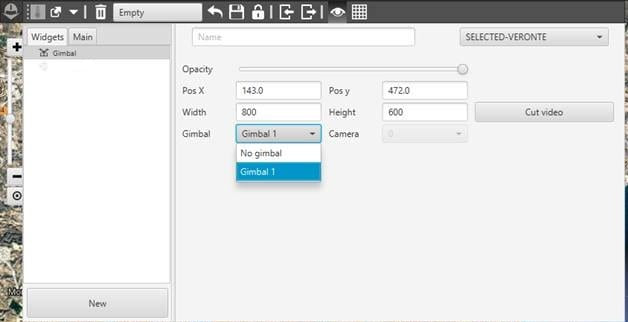
Workspace: Gimbal widget
After doing it click on ‘ …’ placed on the top right corner of the widget Gimbal.
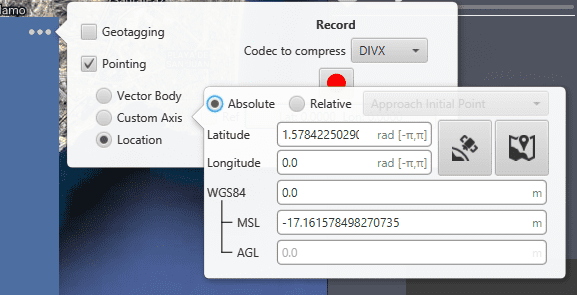
Gimbal widget: Pointing
In this window it is possible to set where the tracker will point. It can be a absolute position, like the one from the image, or a Relative position . For example the Moving object incompress 2 (Veronte Air in this case).
It is possible to test the correct tracking by moving the Veronte Air (or the platform if it is possible) and checking the tracker correspondent rotation in Pan and Tilt. To perform this test it is useful to maintain the UAV at > 20 [m] from the Ground Station because of the bad transmission link in case of small distances.