Failsafe¶
Veronte allows users to create different types of Failsafe automations according to they need combining different Actions and Events. The more common automations are shown below.
Radio Error¶
When the radio connection from the ground station to Veronte Air is lost, the aircraft is forced to change to auto mode and landing phase.
.png)
Failsafe for radio link-off – Plane
When the value of the flag that evaluates the TX or RX error (“TX/RX Packet Error Rate (on board)”) has a value of 1 (0.8 is established for safety), and the aircraft is in a certain phase (climb and cruise), it is forced to land.
Video Tutorial: https://www.youtube.com/watch?v=mmzRw9V9OCs
When using a multicopter the same proccess is done with some changes.
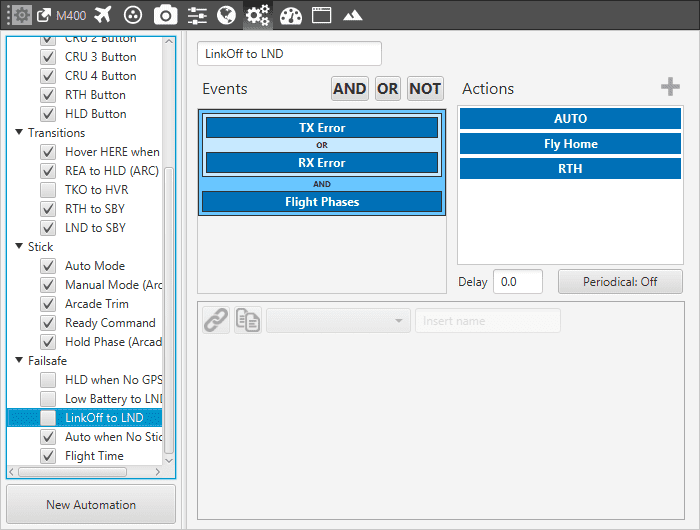
Failsafe for radio link-off – Multicopter
The actions carried out now are:
Mode: select a change to AUTO mode.
Phase: change to the phase Return to Home, in this phase is definied the Home point. See the example of this phase for the quadcopter M400 in section Mission Phases.
Go to: as safety condition, this action is added and the Home point is selected.
Low Bettery¶
When the battery is below a certain level (15.2 Volts in this case), and the aircraft is in climb or cruise, it is automatically commanded to land.
.png)
Failsafe for low battery
GPS Signal lost¶
When the UAV is not receiving the GPS signal, the system automatically adapts the navigation algorithm to avoid a possible accident by obtaining the aircraft attitude trough the AHRS reference system. Besides that, it is also needed that the aircraft changes to a flight phase where the control is made over the attitude angles instead of position variables (heading, flight path). This phase is commonly known as HOLD, which has a guidance to keep pitch, roll and IAS at a certain value, and with PIDs in pitch and roll having two blocks for that angles and its rates.
The event of this fail safe automation will be the loss of GPS signal (type alarm), while the action is type phase (Hold).

Failsafe for GPS signal lost