Mounting¶
Cable Connection¶
Package content includes the following cable. One connector must be connected to Veronte Autopilot and the other one to the CS Cable or the Aircraft connector in case of HIL Simulation using the complete platform system.

HIL Simulator Cable
Veronte Pipe Configuration¶
There are 2 configuration items on Veronte Pipe, one relating communications between the application and the X-Plane simulator and another one refereeing the autopilot configuration.
Veronte Pipe acts as a “bridge” between Veronte Autopilot and XPlane. Hence, these are the variables that the Autopilot receives from Pipe and how they are processed:
Heading, pitch, roll: received in [deg], converted to [rad]
Roll rate, pitch rate, yaw rate: received in [rad/s]
Longitude, latitude: received in [deg], converted to [rad]
- Height: received MSL height in [ft], converted to ellipsoidal height in [m]
X velocity, Y velocity, Z velocity: received in [m/s]
Accelerations (G-loads): received in g’s, converted to [m/s2]
Incidence angle (Alpha) and sideslip angle (Beta): received in [deg], converted to [rad]
- Indicated Air Speed: received in [kts], converted to [m/s] and projected to body axes
Height above ground level: received in [ft], converted to [m]
On the other hand, as it is explained in the follwoing section, Veronte Pipe sends XPlane the commands received from the Autopilot according the variables of the aircraft configuration in XPlane.
Autopilot Configuration¶
HIL simulation tab is available within Veronte Autopilot setup toolbar. The user can link the variables on Veronte Autopilot with the corresponding ones in X-Plane simulator.
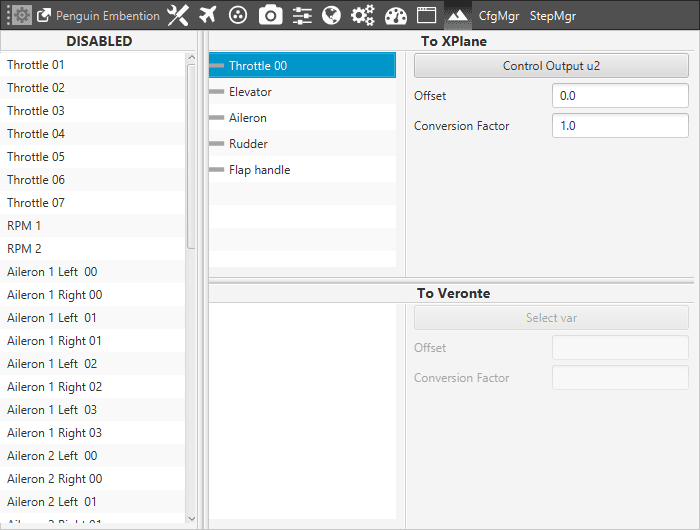
Veronte Pipe – HIL Setup
In this panel, X-Plane variables are available on the left side (Disables). In addition, it can be seen two section more To XPlane and To Veronte.
In order to configure the simulation variables, users have to:
Enable the ones that have been configured in the aircraft model (Plane Marker). Just drag and drop them into To Xplane section.
Warning
Always make sure that surfaces are moving in the right direction and with the correct deflection angle.
To avoid mistakes is possible to set a positive fixed deflection (Control Tab) in Standby phase for all surfaces and control surface deflections in the X-Plane model.
Surface control variables are of two types:
Radians measure (variables with numbers)
Degrees measure (variables with no numbers)
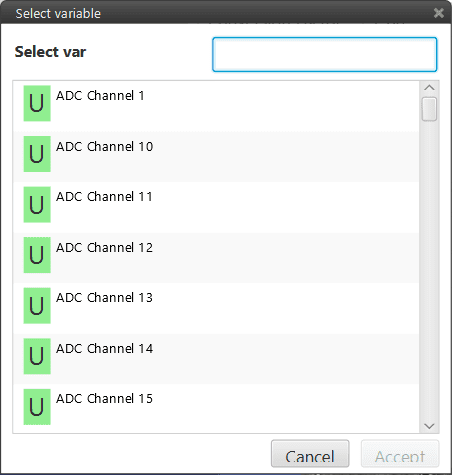
Once X-Plane variables have been enabled, select the actuator variable (Control Output) that matches with the ones in Veronte autopilot. A new window will be displayed for each variable.
Set a Conversion Factor or Offset, if it is necessary. Conversion factor multiplies the Veronte output signal and can be used in case units on Veronte and the X-Plane simulator do not match (Surfaces in X-Plane move normally in a [0,1] range). The following operation allows to converting an angle [deg] measure to the X-Plane form:
(Angle + Offset) Conv.Factor = …
When Angle and Offset are measured in [rad] and the Conversion factor is a constant (normally it can be calculated as 1/(deflection angle in [rad]).
In the case of [rad] measures, the Conversion factor must be set in 57,29578 ([deg]-[rad] conv. factor).
Finally, it is necessary to configure the communication between Veronte Pipe and X-Plane, see section below.
Veronte Pipe Communications¶
In order to start the simulation, select the HIL option (1) on the Veronte Unit, this is available on the side menu . Popup screen will be displayed (2) for selecting the kind of simulation and configuring the parameters.
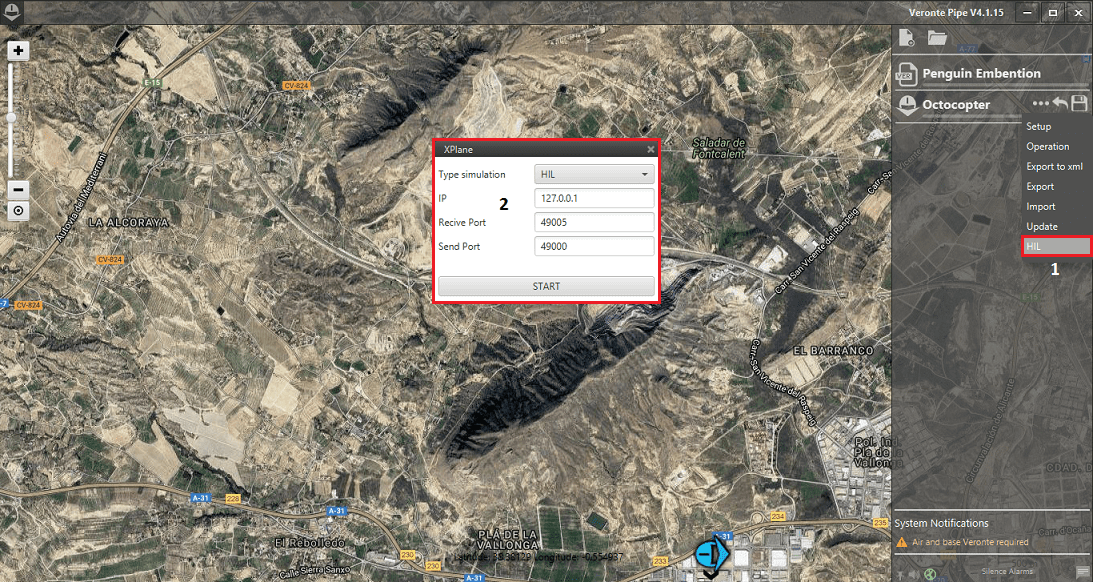
Veronte Pipe – HIL Communications
Changing the default values is only recommended for advanced users. Press start in order to start the data transfer between X-Plane and Veronte Autopilot.
Warning
The simulation must be started when the aircraft is in the Initial phase (the one that gets in once is powered). In this phase the X-Plane will simulate the GPS signal to locate the autopilot in the place indicated by the airport on X-Plane.