Mission Phases¶
In this section, it will be explained how to configure a whole mission for an airplane, in this case, Mentor. The typical phases will be detailed and the guidance for each one of them will be presented.
Takeoff¶
The takeoff phase will be the one where the aircraft goes from the initial to the lift off point.
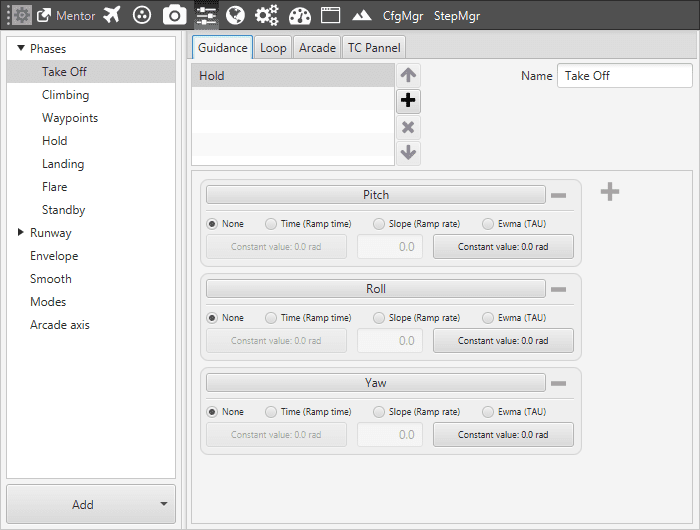
Take Off Phase – Guidance
The guidance for this phase will be a Hold of three variables:
Pitch and Roll Angle: kept at 0 [rad].
Yaw Angle: kept at the value that the aircraft has when is set on the runway i.e, the variable selected will be Yaw.
Regarding the control loop, there are PIDs in the pitch, roll and yaw control channels, while the throttle has a ramp as defined in the following figure.
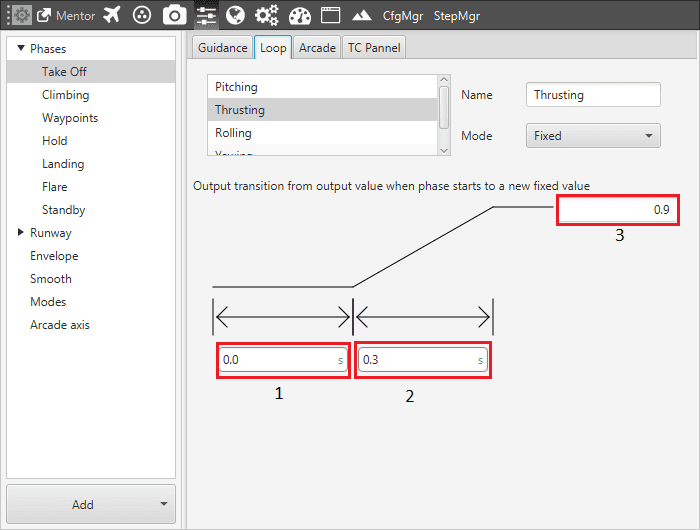
Take Off Phase – Loop
Here the initial value is set, in this case 0 because the aircraft starts from a standing point.
Time of transtion, 0.3 seconds, the throttle is increased from the initial to the final value.
Final value, 0.9 .
Climbing¶
The climbing phase is used to make the airplane reach the cruise altitude after the takeoff.
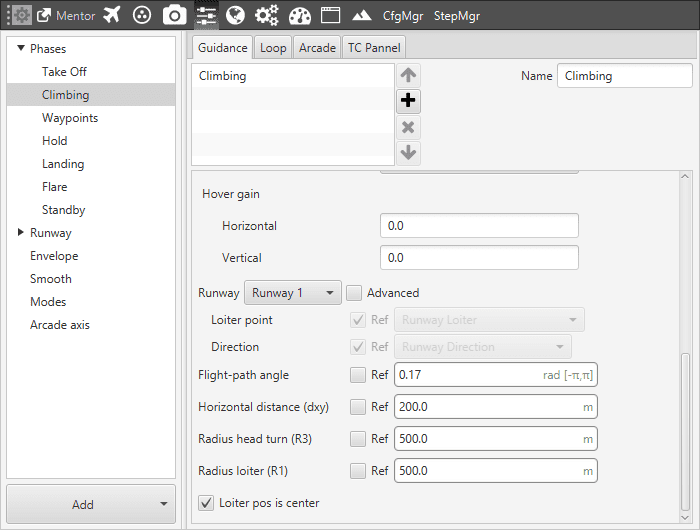
Climbing Phase – Guidance
This fase consists of Climbing Guidance:
Line attraction: value related to how strongly the aircraft tries to reach a path (climb path in this case). This value is commonly between 20 and 40 for airplanes.
Set speed: speed that will have the airplane during the climb, 15 [m/s] .
In this phase, the aircraft reaches the mission altitude by performing a spiral route. In order to determine the correct path, these parameters must be set:
Runway: here is selected the runway which previously has been edited in its configuration menu.
Flight Path Angle: angle at which the aircraft will climb, 0.17.
Horizontal Distance: is the distance from the point where the aircraft enters in the phase which contains the climbing guidance, to the start of the circular climbing path, 200 [m].
Radius Head Turn R3: radius of the turn made to head the airplane towards the loiter direction, 500 [m].
Radius Loiter R1: radius of the loiter ascending made by the aircraft to reach an altitude suitable, 500 [m].
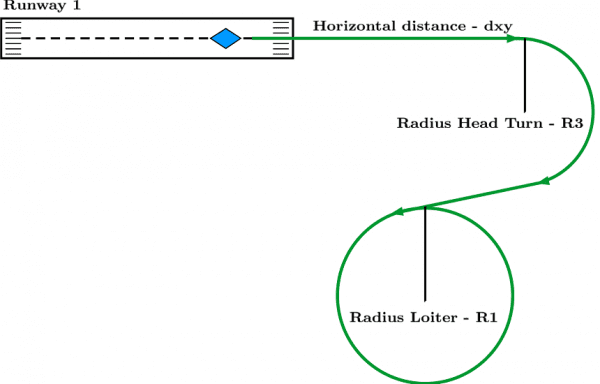
Climbing Path
Cruise¶
The cruise phase is where the aircraft follows a route marked by a set of waypoints, which are defined by the user in the Mission menu.
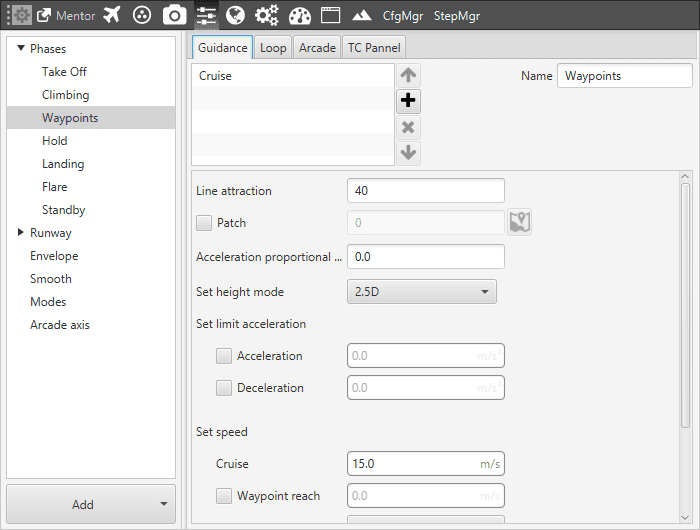
Cruise Phase – Guidance
This fase consists of a Cruise Guidance. Parameters set here are the same as the ones from the climbing phase.
Line attraction: 40.
Set Speed: 15 [m/s].
In this guidance, there is an option related to the gains used to recover the hover point in an multicopter, Hover Gain. In this case, the platform configured is an airplane, so this option will not be used.
Warning
When using the Cruise phase, the aircraft will automatically follow the waypoint route. An automation has to be created to make the platform perform in a different way.
Hold¶
This phase is used to keep the aircraft at a constant heading, for example, when the radio connection is lost.
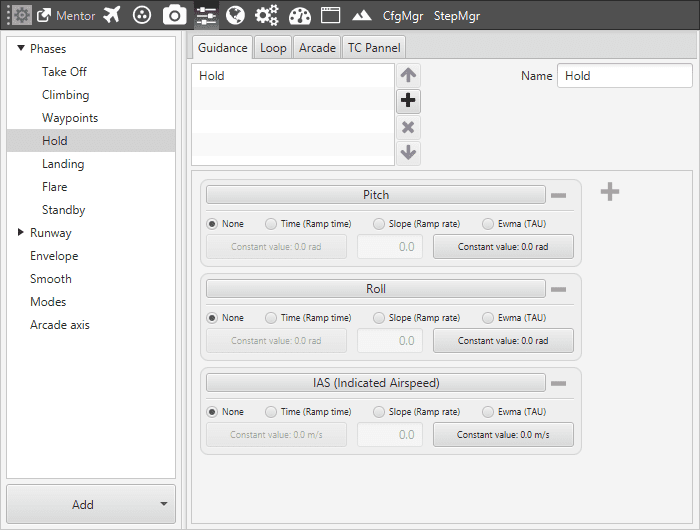
Hold Phase – Guidance
When this phase is active, the aircraft flies in a straight line, until another phase is commanded.
Pitch, Roll and IAS: kept at a constant value 0.
Landing¶
This phase is used to make the aircraft land at a certain airport. When the flight altitude is too big, this phase contains the parameters which define the route performed by the platform to descent until an altitude where it can line up with the runway.
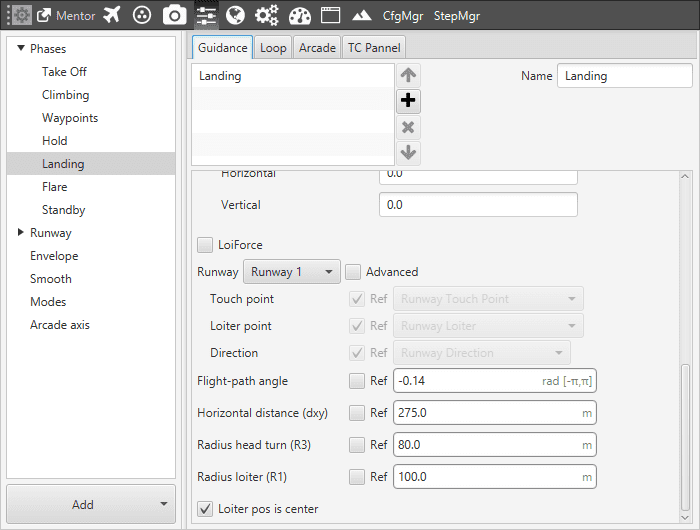
Landing Phase – Guidance
The guidance to be configured is Landing:
Line Attraction: 20.
Set Speed–Cruise: 14 [m/s].
Finally, the following parameters define the path during this phase.
Runway: here is selected the runway which previously has been edited in its configuration menu.
Flight Path Angle: angle at which the aircraft will descend, -0.14 [rad].
Horizontal Distance: is the distance from the point where the aircraft enters in the phase which contains the climbing guidance, to the start of the circular climbing path, 275 [m].
Radius Head Turn R3: radius of the turn made to head the airplane towards the runway direction, 80 [m].
Radius loiter R1: radius of the loiter descending made by the aircraft to reach an altitude suitable to perform the landing manoeuvre, 100 [m].
The route of this phase is shown in the following figure, where each one of the parameters that define it are defined.
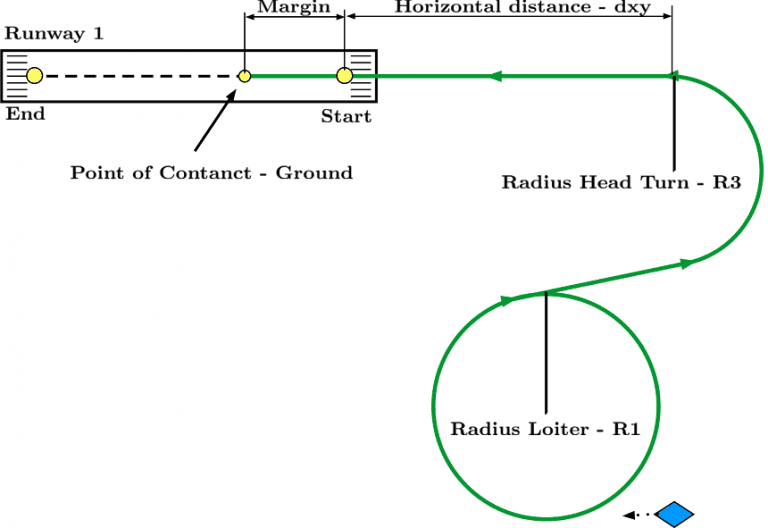
Landing Route
Flare¶
The flare is a maneuver made by an aircraft just before the touchdown. Consists on a rise of the nose to decelerate the descent rate and set a proper attitude before touching the ground.
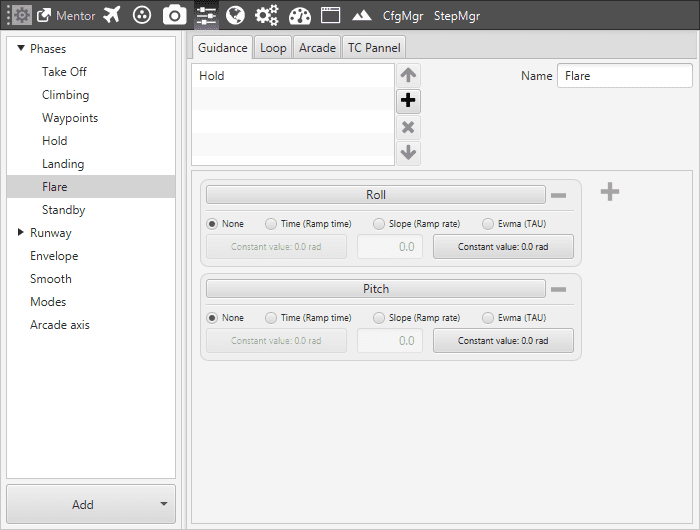
Flare Phase – Guidance
Considering what is wanted in this phase, the guidance to command is a Hold.
Roll – Pitch Angle: kept at a constant value 0 [rad].
Regarding the thrust in this phase, the engines are shut off, so the mode of the controller is off.