Complete Simulation¶
After setting the main blocks, the result should look like this:
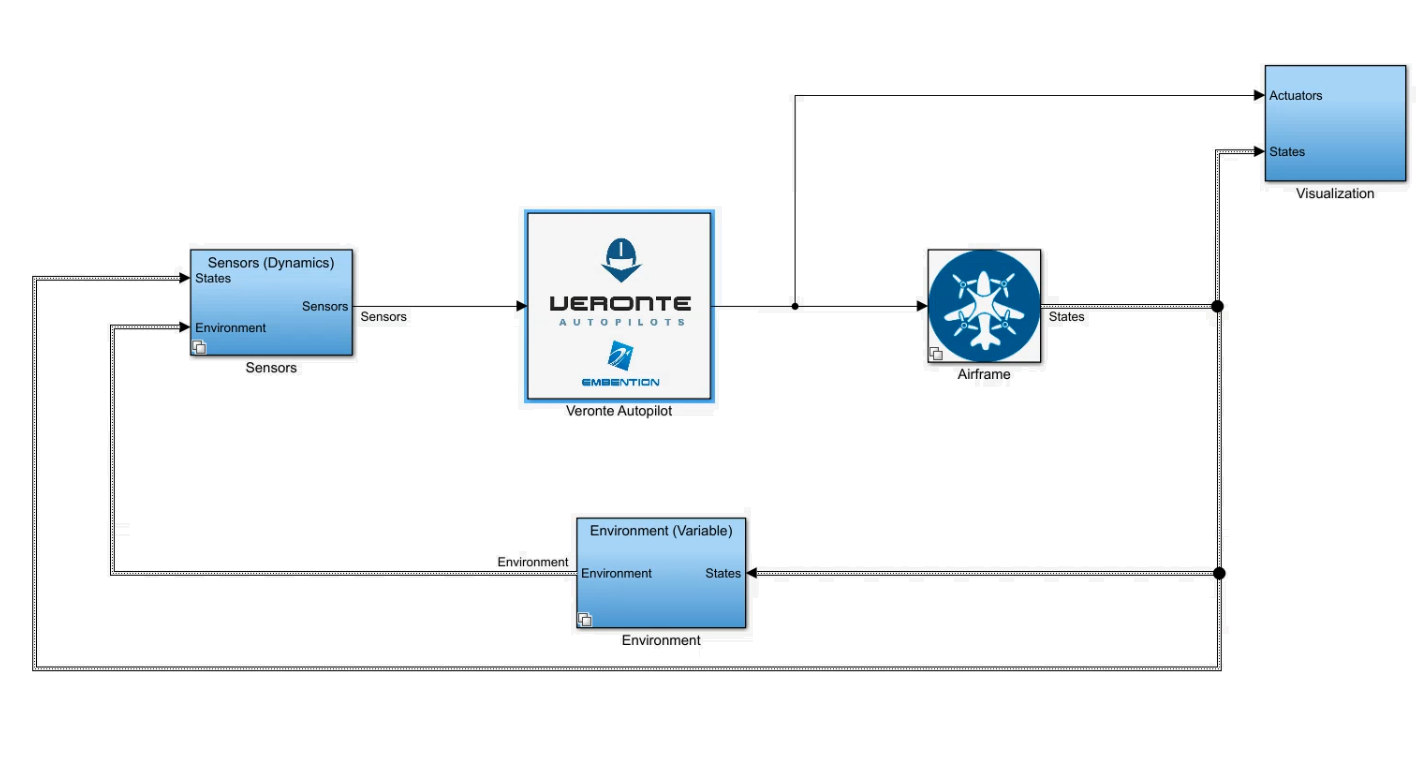
Complete Setup Example
The main systems are:
Veronte Autopilot: It contains our flight control software. It basically consists of the S-function and their link with the rest of the blocks (sensors, outputs, etc.)
Airframe: a model of the flight dynamics.The inputs of this systems are the output of the Veronte autopilot (nominal value for servos). For example, for a quacopter, the input of this block consists of the values of the PWM signal (one for each motor). Then with this value the airframe system updates the platform’s state. The state vector is used for predict the new environment conditions and the sensors readings.
Environment: a model of the atmosphere, magnetic field, WGS84…
Sensors: it contains individual blocks or subgroup of all the sensors that veronte needs as input.
Visualization: It contains Display blocks, scopes, flight instruments…
The time step should be set to 0.0002 as shown in the next figure in order to guarantee a good GNC/Adquisition frequency:

Time step settings