 Sensors¶
Sensors¶
RPM¶
CEX can measure RPMs by reading froms up to four input sources:
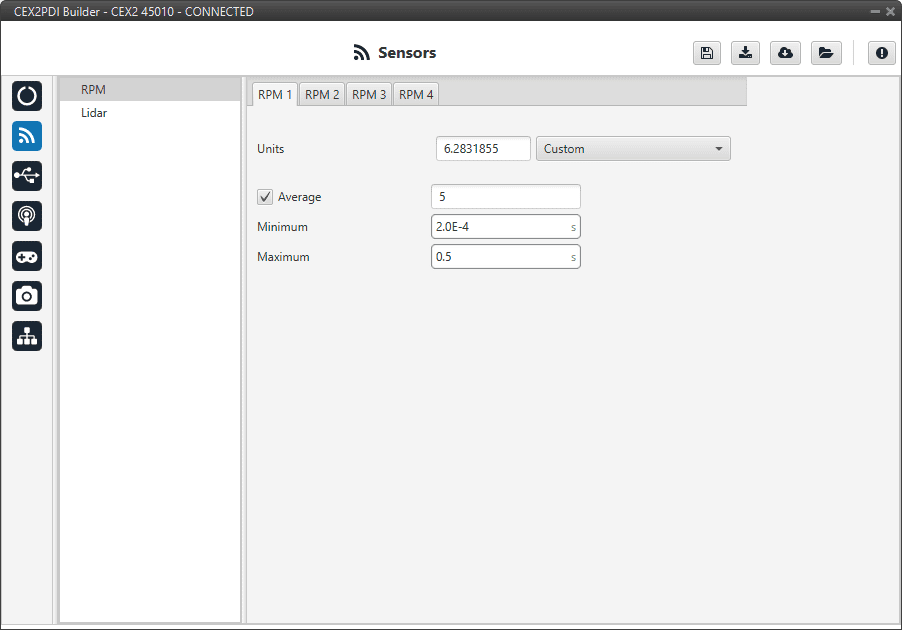
RPM panel¶
Units: Sensor conversion factor. It can be Custom, Radians per pulse and Pulses per cycle.
Average: It is a filter to avoid voltage spikes. The readout of the pulse can be filtered for the output to be an average. The amount of measurements to do the average needs to be specified.
Minimum: Here the minimum expected pulse period needs to be specified. This will discard spurius pulses (e.g. induced by EMI) which are smaller than this minimum pulse.
Maximum: The maximum period of time allowed without capturing. If no incoming pulse is received for more than this time, the output RPMs will be 0.
A configuration example to send RPMs can be found in Reading/Sending RPMs - Integration examples section.
Lidar¶
The I2C bus allows the connection of several devices with different addresses to the same line via master-slave communication. At this moment, CEX supports the following Lidar devices:
Garmin LIDAR-Lite v3: Optical distance measurement sensor with a range from 5 cm to 40 m.
SF11 Lidar: Long range laser altimeter. Supported SF11/B and SF11/C with a range of maximum 50 m and 0.2 m to 120 m respectively.
SF20 Lidar: OEM laser altimeter module. Supported SF20/C with a range of 0.2 m to 100 m.
CEX allows up to 5 Lidar devices to be connected to the system at the same time. The configuration menu can be seen below:
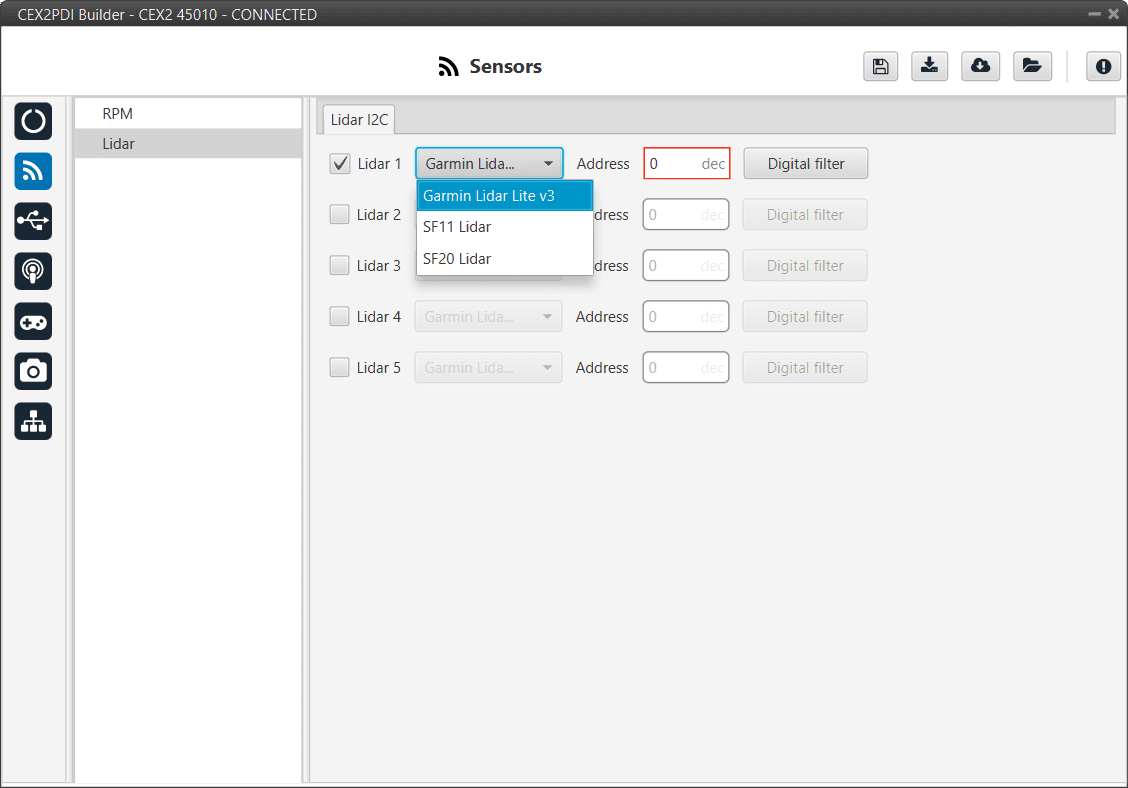
Lidar panel¶
After enabling the needed number of Lidar devices, configurable parameters are:
Type of Lidar.
Address: With an accepted value between 16 - 239, this is the origin address from the Lidar being configured.
Digital filter: Enables a low pass filter which its cutoff frequency is configured manually, allowing the user to input any desired value in Hz. It is a software filter.
Note
I2C address will be different for different devices make sure to define it properly by checking the manufacturer documentation.