Veronte Autopilot¶

Veronte Autopilot
Veronte Autopilot is a miniaturized high-reliability avionics system for advanced control of unmanned systems. This control system embeds a state-of-the-art suite of sensors and processors together with LOS and BLOS M2M datalink radio, all with reduced size and weight.
Operation¶
The unique Plug ´n Fly control system, Veronte Autopilot ads fully autonomous control capabilities to any unmanned system for complete operation, compatible with: UAV, Drone, RPAS, USV, UGV…
Highly configurable: Veronte control system is fully configurable; payload, platform layout, control phases, control channels… even the user interface layout can be user-defined.
Custom routines: User selectable automatic actions, activated on system event or periodically.
Actions: phase change, activate payload, move servo, go to, onboard log, parachute release…
Events: waypoint arrival, inside/outside polygon, alarm, variable range, button…
Telemetry & log: Embedded datalink for system monitoring and telecommand and customizable user log in both onboard and control station, all with user-defined variables and frequency record.
External sensor: Support for external sensor connection: magnetometer, radar, LIDAR, RPM, temperature, fuel level, battery level, weather…
Payload & Peripheral: Transponder, secondary radios, satcom transceivers, camera gimbals, motor drivers, photo cameras, flares, parachute release systems, tracking antennas, pass through RS232, RS485 & CAN tunnel…
Platforms¶
The Veronte Autopilot is designed to control any unmanned vehicle, either aircraft such as: multirotors, helicopters, airplanes, VTOL, blimps… as well as ground vehicles, surface vehicles or many others. Custom flight phases and control channels provide support for any aircraft layout and performance by using the same software and hardware for: UAS, RPAS, Drone, USV / ASV, UGV…
Veronte FCS overview
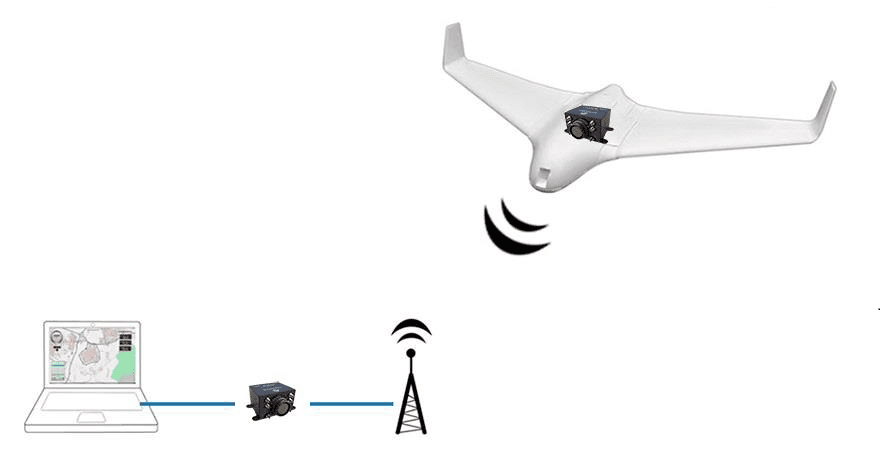
Veronte contains all the electronics and sensors needed in order to properly execute all the functions needed to control the UAV. A Veronte-based FCS contains the following elements:
Veronte (Air): it executes in real time all the guidance, navigation and control algorithms for the carrying airframe, acting on the control surfaces and propulsion system and processing the signals from different sensors: accelerometers, gyroscopes, magnetometer, static pressure, dynamic pressure, GPS (EGNOS/Galileo compatible).
Veronte (Ground): apart from linking to other flying Veronte units and supporting manual and arcade modes with conventional joysticks, it can also control a directional antenna in order to expand the maximum range. It communicates to Veronte Pipe (software for ground segment mission management).
Veronte Pipe: software for mission management at the ground segment. It monitors flying vehicles in real time and can also reproduce past missions in an offline manner. It is also the graphical user interface where commands and flight plans are produced.
Safety¶
Veronte autopilot includes the following features in order to provide your UAS with the best safety performances:
Redundant IMU.
Redundant GNSS receiver.
Redundant Pressure sensor.
Dual core principal microprocessor + dissimilar safety microcontroller (comicro).
Independent power supply for main system and safety microcontroller.
In case any malfunction occurs in the microprocessor, the comicro can activate different safety mechanism by means of 2 digital outputs and 1 serial port.