Sensors Calibration¶
The internal sensors fitted in Veronte Autopilot can be calibrated through the menu that can be displayed from the Veronte Panel.
Veronte Panel – Parameters Calibration
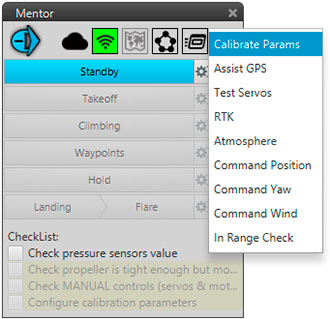
The Calibrate Params option will open the calibration menu shown in the following figure.
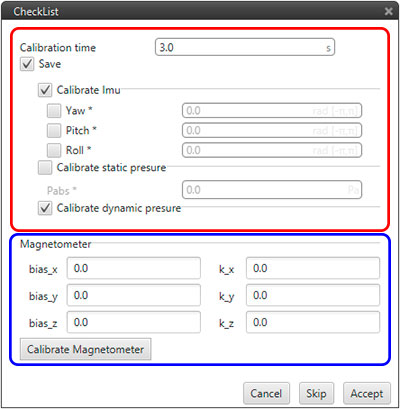
Sensors Calibration Menu
This menu allows calibrating the IMU, the Dynamic pressure sensor and the Static pressure sensor. When sensors are marked, the Save option is selected and the button “Accept” is clicked, the calibration is done, so the user should proceed with caution and mark only the sensors that he wants to calibrate in the red section.
The IMU is calibrated according to the aircraft current position, so the UAV has to be located in a leveled position when performing the calibration. The three axes of the platform can be calibrated separately and at the desired angle. For example, the following figure represents the typical IMU calibration of Mentor which has 11° [deg] of pitch angle when positioned horizontally on the ground.

IMU Calibration of Mentor
The Static pressure sensor is used to obtain the altitude. If the pressure at the flight area is known, introducing this value and calibrating the sensor will improve the height estimation.
The Dynamic pressure sensor (Pitot tube), used to estimate the velocity with respect to the air, has to be calibrated when the orifice of the tube is covered, so the calibration is done from a 0 m/s lecture.
The blue section of the panel allows the user to access to the Magnetometer calibration panel. For more info about the magnetometer, see section Magnetometer.