Introduction

Veronte Autopilot 1x is a sensor-redundant control system designed to control any autonomous vehicle, either aircraft such as multirotors, helicopters, planes, VTOL, blimps, etc., as well as ground vehicles, surface vehicles or many others.
Veronte Autopilot 1x hardware embeds a redundant state-of-the-art suite of sensors, together with LOS and BLOS M2M datalink radio and a DAA module based on Remote ID or ADS-B, all with reduced size and weight.
Veronte Autopilot software tools are specifically designed for the operation and configuration of the Veronte Autopilot. Veronte Ops is the software employed to operate the autopilot from a user-configurable interface and 1x PDI Builder permits configuring the autopilot and adapting it to the specific needs of the project.
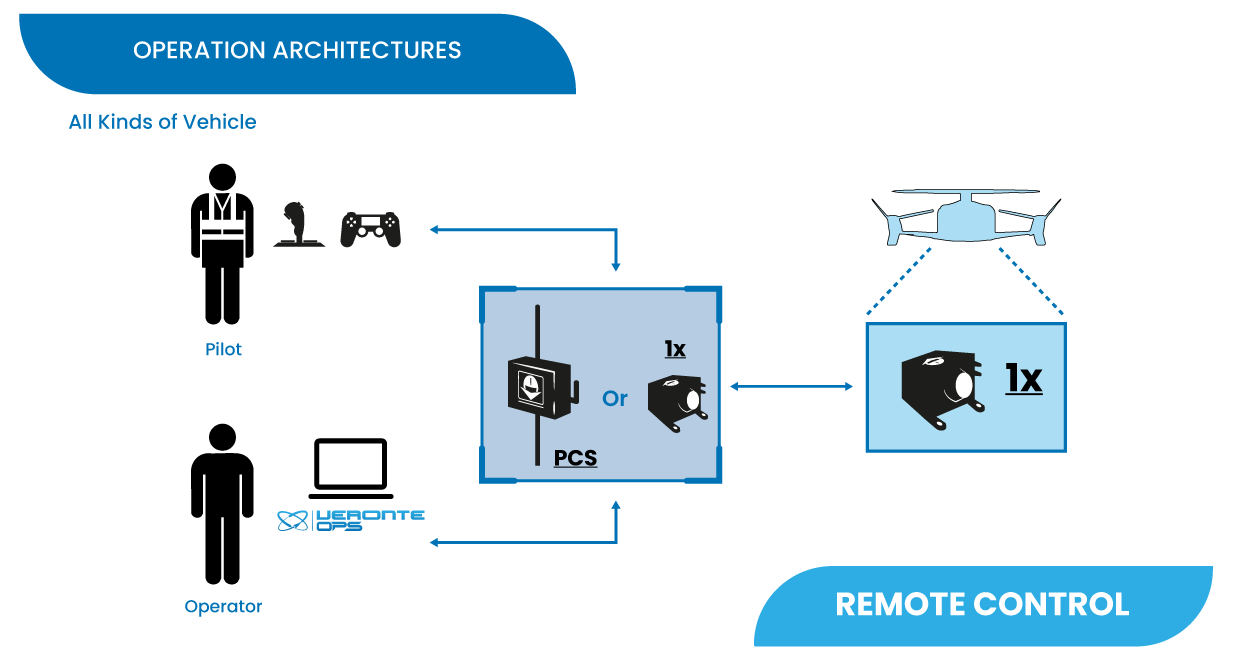
Typical Drone Setup
Veronte Autopilot is compatible with both LOS and BLOS communications for the remote control of autonomous vehicles. Physical or virtual sticks can be used for taking manual or assisted manual control at any time during the operation.
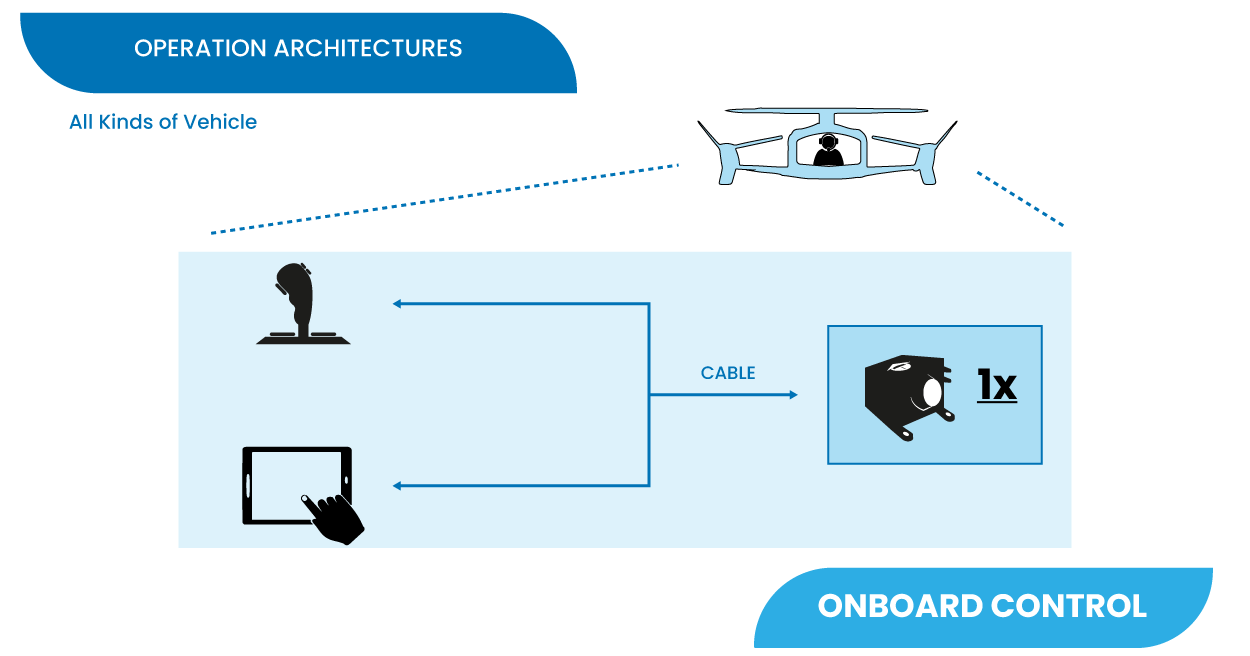
Typical eVTOL Setup
An onboard display and joystick interface are available for manned eVTOL and aerotaxi applications. Autonomous flight modes and fly-by-ware control can be configured according to the level of autonomy required.
Main Features
- Highly configurable: Fully user-configurable; payload, vehicle layout, control phases, control channels, etc.
-
Custom routines: User-selectable automatic actions, activated on system events or periodically.
- Actions: Phase change, activate payload, move servo, go to, onboard log, parachute release, etc.
- Events: Waypoint arrival, inside/outside polygon, alarm, variable range, button, etc.
-
Telemetry & log: Customizable telemetry and onboard log compatible with internal or external datalink modules, all with user-defined variables and recording frequency.
- External sensor: Support for external sensor connections: magnetometer, radar, LIDAR, RPM, temperature, fuel level, battery level, weather, etc.
- Payload & Peripheral: Transponder, secondary radios, satcom transceivers, camera gimbals, motor drivers, photo cameras, flares, parachute release systems, tracking antennas, pass through RS232, RS485 & CAN tunnel, etc.
- Redundant Configurations: Veronte Autopilot 4x is available for applications requiring redundancy and Veronte Autopilot DRx offers distributed redundancy architectures.
© 2025 Embention. All rights reserved.