IMU¶
This menu allows the user to recalibrate the IMU, as they are factory calibrated, to correct any bias in the IMU calibration, including mounting offsets.
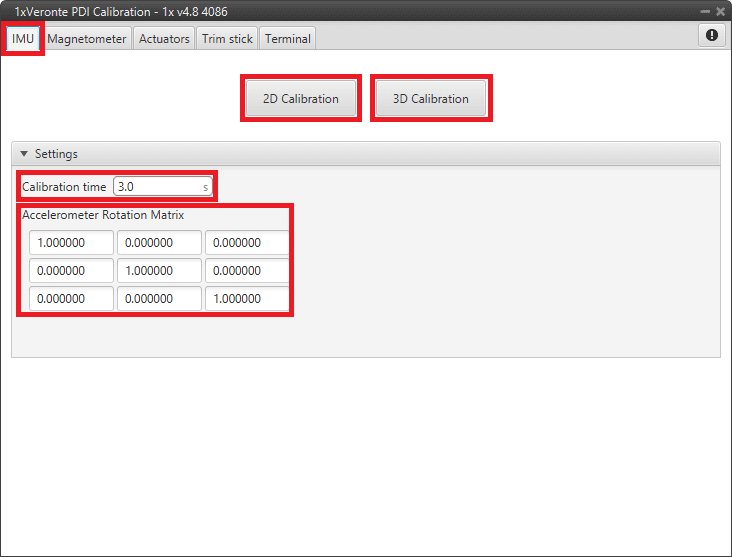
IMU Calibration menu¶
There are 2 calibration options available:
2D Calibration: Only calibrates pitch and roll angles. The autopilot must be horizontal during the calibration process:
2D Calibration¶
3D Calibration: Calibrates pitch, roll and yaw angles and it needs to take measurements in two orientations.
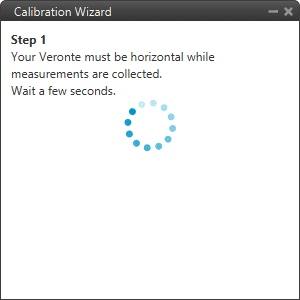
During the first measurement the autopilot must be horizontal:
3D Calibration - First measurement¶
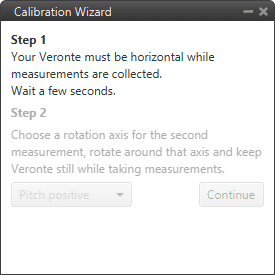
The second measurement requires to rotate the autopilot around the selected axis.
The options are: Pitch positive, Pitch negative, Roll positive or Roll negative.
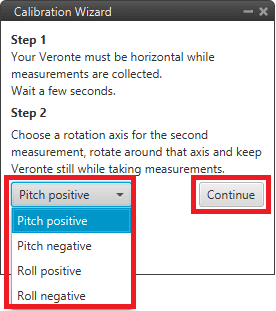
3D Calibration - Second measurement options¶
Once the rotation axis has been selected, click on ‘Continue’ to perfom this second measurement:
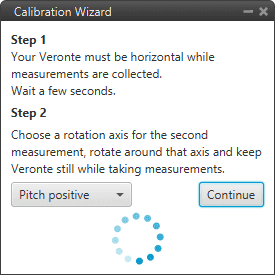
3D Calibration - Second measurement¶
Warning
The autopilot must be turned more than 10 degrees in the selected axis. Otherwise, the calibration will not be performed and the following message will appear to reset the calibration:
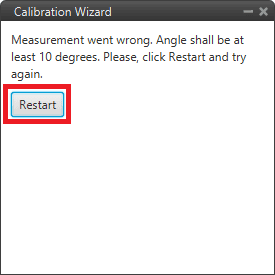
3D Calibration error¶
Settings:
Calibration time: Users can modify the time during which the software is requesting values from the autopilot 1x for calibration.
Accelorometer Rotaton Matrix: This rotation matrix is the result of the calibration performed. Cannot be modified by the user.