Integration examples¶
Serial connection¶
As the com port configuration is common to all devices, the following steps are applied to MC24 and MC110 controllers as an example.
Once Veronte Link is installed, the first step that must be done is to set the connection that your MC unit is currently using. By default, every MC is capable to comunicate through USB, RS232 and RS485 so any of these can be used (properly adapted to USB/serial).
First, click on “+”:
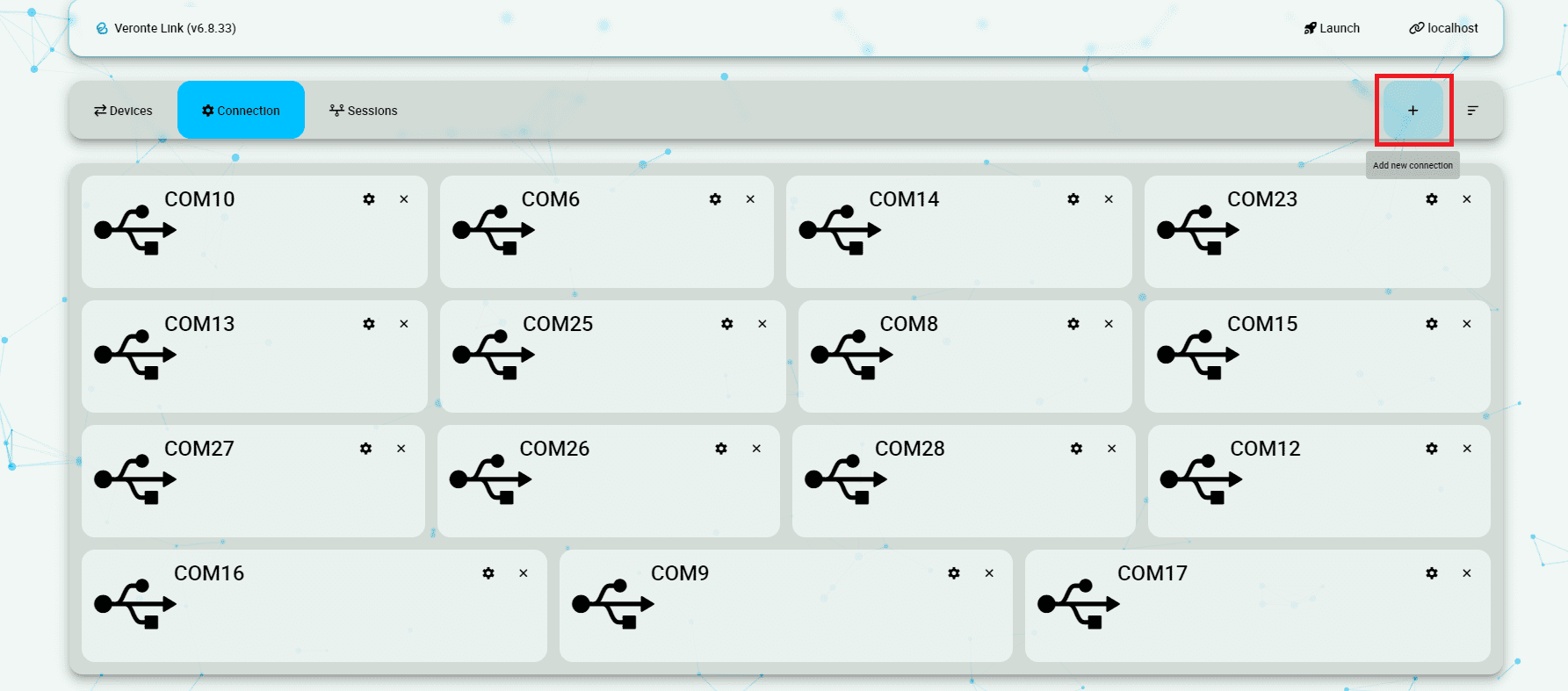
Add new connection¶
Besides, it is required to find out which port is employing the MC unit. Windows allows to do that with the Device Manager from the Control Panel.
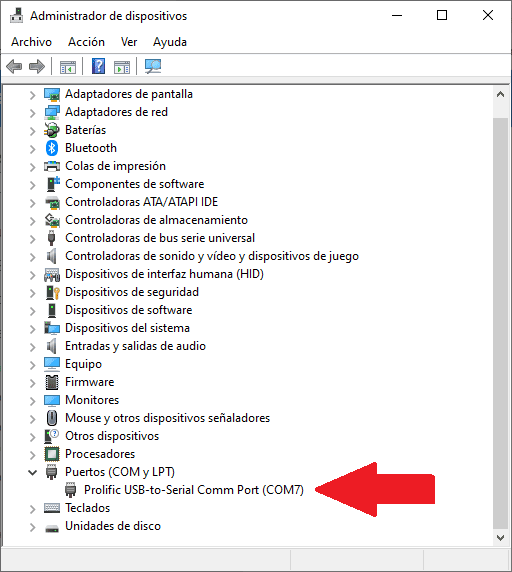
Windows Device Manager¶
Select your COM settings by entering the comm port previously found. Normally, the other default parameters should not be changed.
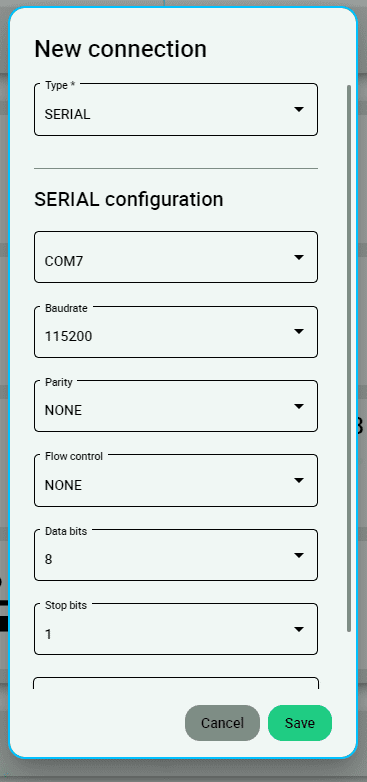
New connection configuration¶
If the selected port is correct and everything went well, a new MC will be displayed in the devices list. However, the device status will remain as CFG: Waiting to read.
The user is ready now to start configuring the motor controller using MC PDI Builder.
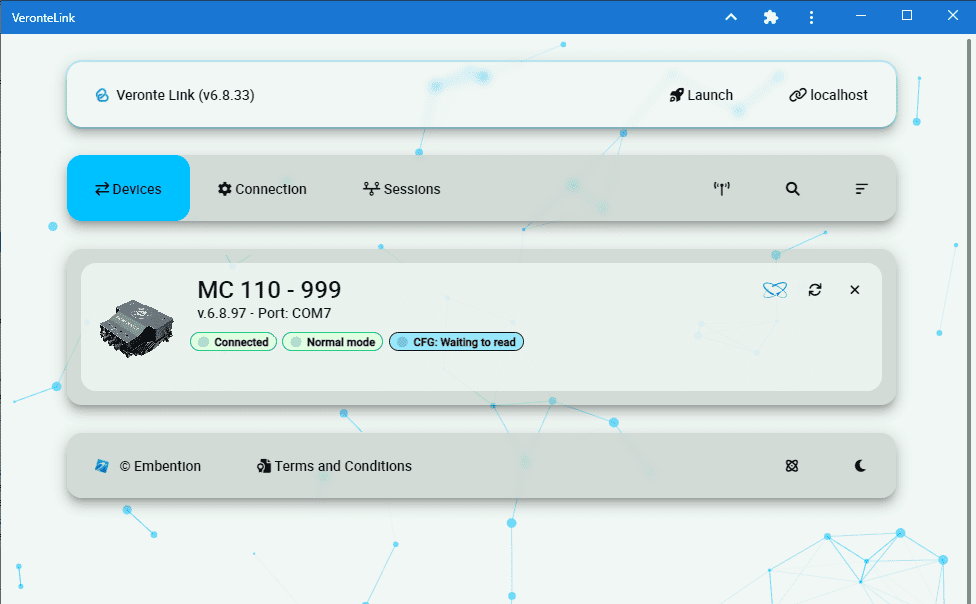
MC unit correctly connected¶
More Veronte devices (MC units, Veronte Autopilots, etc.) could be added following these instructions.
Note
In case of connecting an Autopilot 1x, after a few seconds, the device status should replace CFG: Waiting to read by CFG: Ready, since only autopilot 1x is able to change or load configuration in normal mode.
Veronte Autopilot 1x connected and ready¶
UDP connection¶
Wi-Fi/Ethernet configuration
The following steps are applied to a PCS unit as an example.
Important
If connecting through Ethernet, step 1 does not apply.
The first step is to look under available networks for the PCS unit and connect to it.
Once the connection is made, enter Veronte Link and configure the UDP connection in the Connection menu.
First, click on “+”:
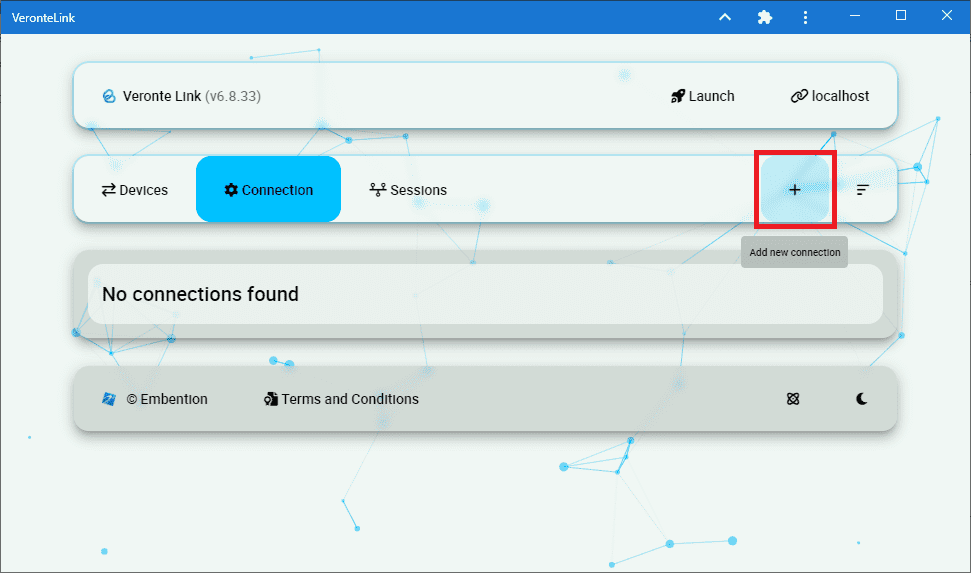
Add new connection¶
Then, the configurable parameters must be entered.
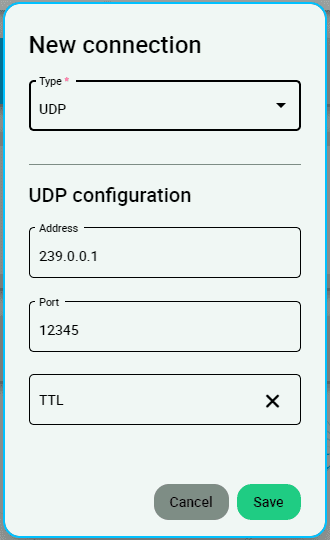
New UDP connection configuration¶
Important
This address and port are configured for this PCS unit, they do not have to be the same for another device.
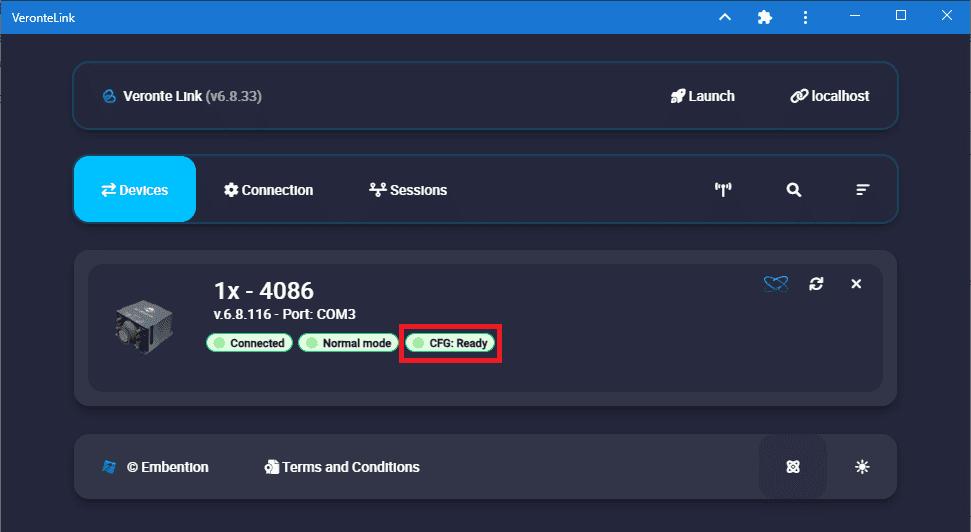
If the configured connection is correct and all went well, a new PCS will appear in the device list and the device status will change to CFG: Ready.
The user is ready now to start configuring the PCS using 1x PDI Builder.
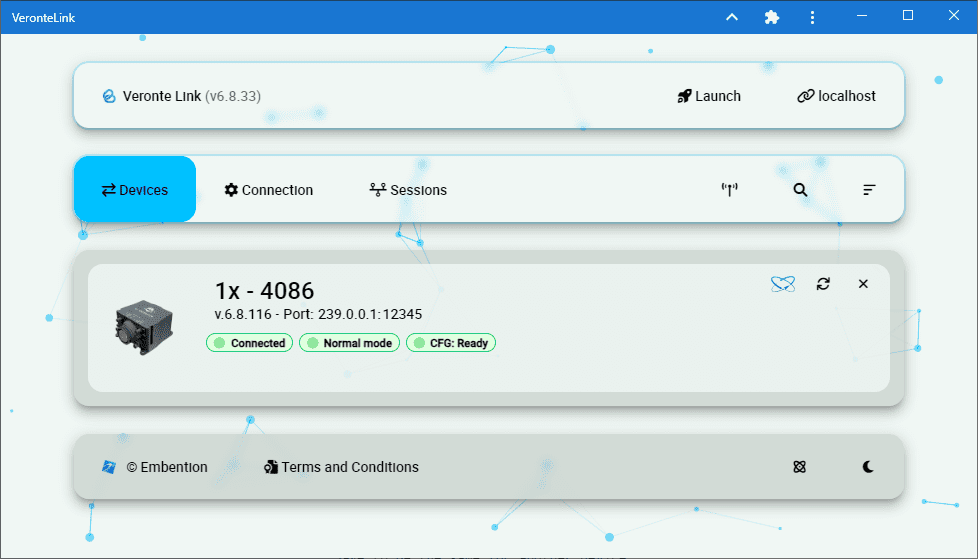
PCS unit correctly connected¶
Note
The image of a Veronte Autopilot 1x is displayed and not a PCS as the device that is actually connected is the Autopilot 1x inside the PCS.