Operation¶
Once the hardware has been connected and Veronte Pipe and X-Plane have been configured, operation can starts and the system can be operated as if it was on a real flight.

M400 Flight Simulation
When the X-Plane model is uploaded, GPS is simulated and the UAV must be visible on VerontePipe map. With GPS signal it is possible to pass the system to Standby phase and to start flight. X-Plane flight starts from an airport; a custom airport must be defined for simulating out of available airports.
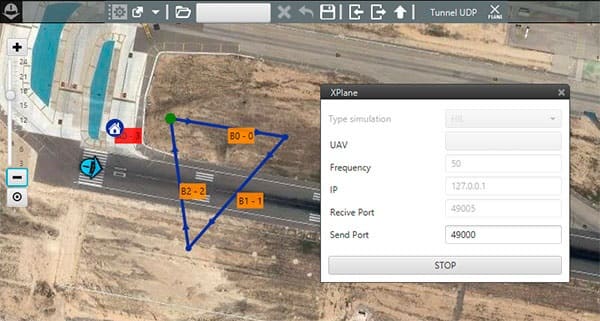
Start GPS simulation
Moreover, it is possible to create a new airport. In order to do that, the user should follow the X-Plane tutorial presented in the next link . Once the aircraft has taken off from the airport on X-Plane the automatic control will start and the aircraft will fly to the defined mission on Veronte Pipe.
Warning
The flight is simulated in all real case aspects. Always make sure that the mission is well configurated and check the terrain profile is in the correct position.
The operator can fly the system as on real flight, being compatible with main Veronte features: real-time mission edit, in-flight automatic to manual control, flight data recording… Sometimes is possible, during an edition saving, that the simulation fails because the simulation link suffers a little interruption (this fact does not exist in real flights).
When using the HIL simulator connected to the platform, control actuators will move as if it were flying. In order to avoid damaging the system or personnel, make sure that the motor is disconnected and there is no shock risk due to the actuators movement.
Warning
Always make sure that motor has been disconnected before starting a simulation. Otherwise the motor will run as if it were flying.