X-Plane 11¶
HIL Simulator presents two simulation modes emulated with the flight simulator X-Plane 11:
X-Plane 11 Navigation
X-Plane 11 Sensors
Both simulation modes are suitable for performing fast simulations where extreme precision is not required.
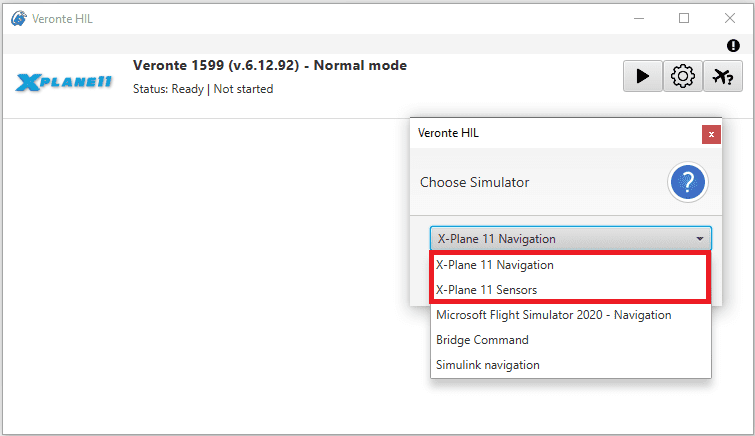
Select X-Plane 11 Navigation or X-Plane 11 Sensors¶
X-Plane Navigation and X-Plane Sensors perform the simulation with different approaches, so users can choose the one that best suits their requirements.
X-Plane Navigation: With this mode, Veronte Autopilot 1x directly receives the clean attitude, altitude and rates of the aircraft from the X-Plane simulation; this data is then processed by the autopilot as if it were the states output from the EKF. On its part, X-Plane 11 receives the control output signals of the autopilot and simulates the aircraft response.
X-Plane Navigation simulates an ideal environment in which sensor reading errors are not considered, thus focusing on testing the control performance.
X-Plane Sensors: With this mode, HIL Simulator simulates the sensor data based on the state signals received from X-Plane 11 and then sends it to the Veronte Autopilot 1x . These calculated values are then used as inputs for the EKF algorithm, and the control response is sent back to X-Plane 11 Simulator.
X-Plane Sensors simulates the processing of real sensors data, allowing to analyse the EFK behavior.
Configuration¶
X-Plane 11 communications settings shall be configured to link with Veronte systems.
Important
For low-performance computers, it may be needed to reduce the graphics quality on the simulator, as described below.
Follow the next steps to configure X-Plane 11 for conducting simulation through HIL.
Note
X-Plane 11 configuration is the same for X-Plane 11 Navigation and X-Plane 11 Sensors simulation modes.
Aircraft Model Installation
X-Plane 11 simulator is compatible with a wide variety of platforms: airplane, helicopter, multicopter, surface vehicle, etc. In order to create the platform model, Plane Maker tool provided by X-Plane 11 must be used. Once the aircraft model has been created, it can be integrated on the X-Plane 11 simulator by following the next sub steps:
1.1: Copy the model folder to the “Aircraft” folder within the X-Plane 11 installation directory.
1.2: Copy the content in the “Airfoils” folder, available in the aircraft model folder, to the “Airfoils” directory within the X-Plane 11 installation directory.
Custom airport
X-Plane flight starts from an airport; a custom airport must be defined for simulating in case of not having available airports. In addition, it is possible to create a new airport. In order to do that, the user should follow the X-Plane tutorial presented in the next link. Once the airport has been created, copy the model folder to the X-Plane 11 installation directory.
X-Plane Settings
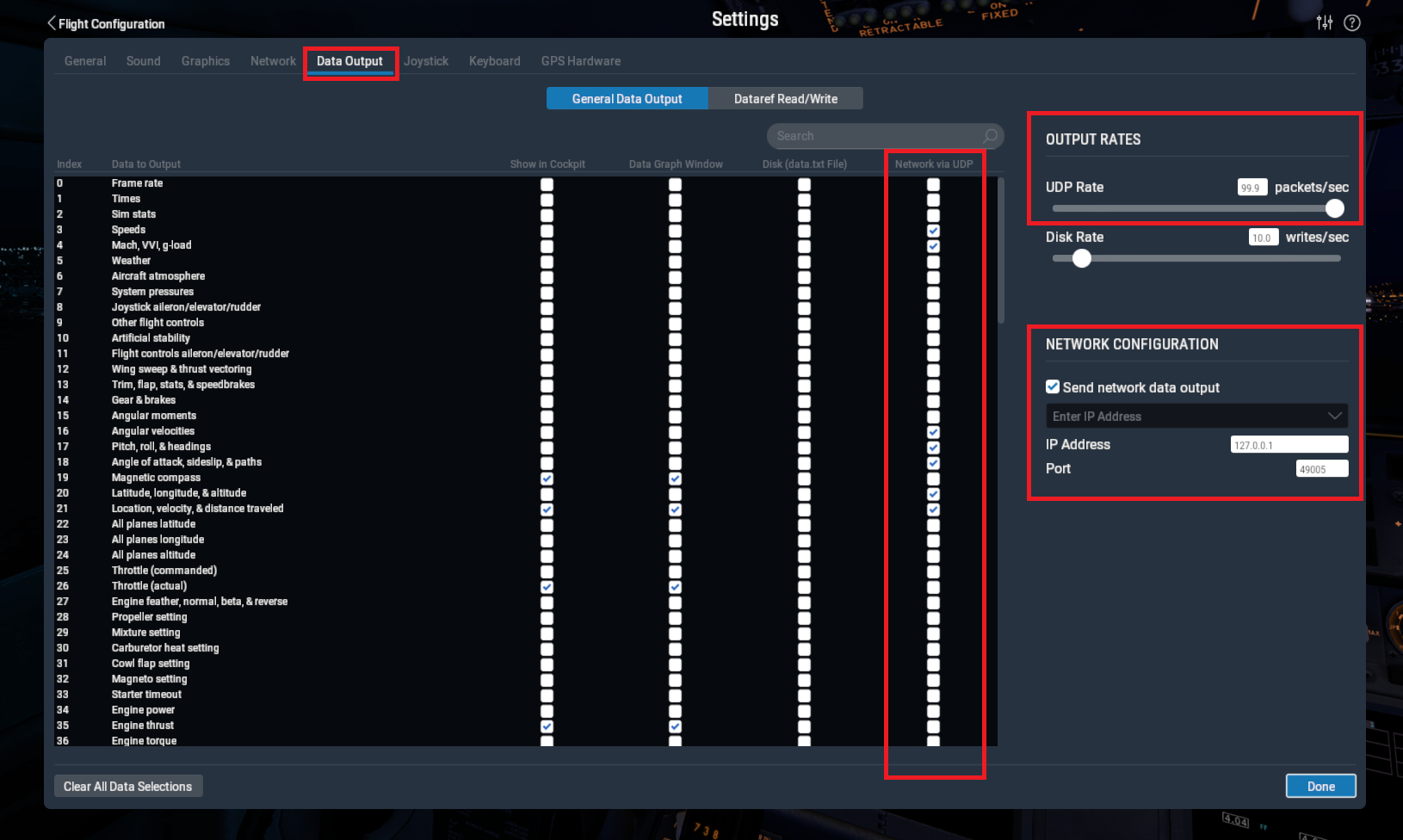
Data transmission settings of X-Plane must be edited on Settings \(\Rightarrow\) Data Output. This configuration must match with HIL Simulator.
Select all the variables to sent through the UDP Network and set the UDP rate at maximum speed. The network configuration must be configured as shown in the following table and picture.
Important
Only selected variables will be simulated. If a value is not configured for simulation, Veronte Autopilot 1x will take the corresponding value from its internal sensors.
Parameter
Value
3 - Speeds
Mark
 in the Network via UDP column
in the Network via UDP column4 - Mach, VVI, g-load
16 - Angular velocities
17 - Pitch, roll & headings
18 - Angle of attack, sideslip & paths
20 - Latitude, longitude & altitude
21 - Location, velocity & distance traveled
IP
127.0.0.1
Receive port
49005
Send port
49000
UDP rate (packets / second)
HIL Simulator frequency, with 99 as maximum value
Simulation¶
For running the simulation in X-Plane 11 software follow the steps below.
X-Plane 11 Setup
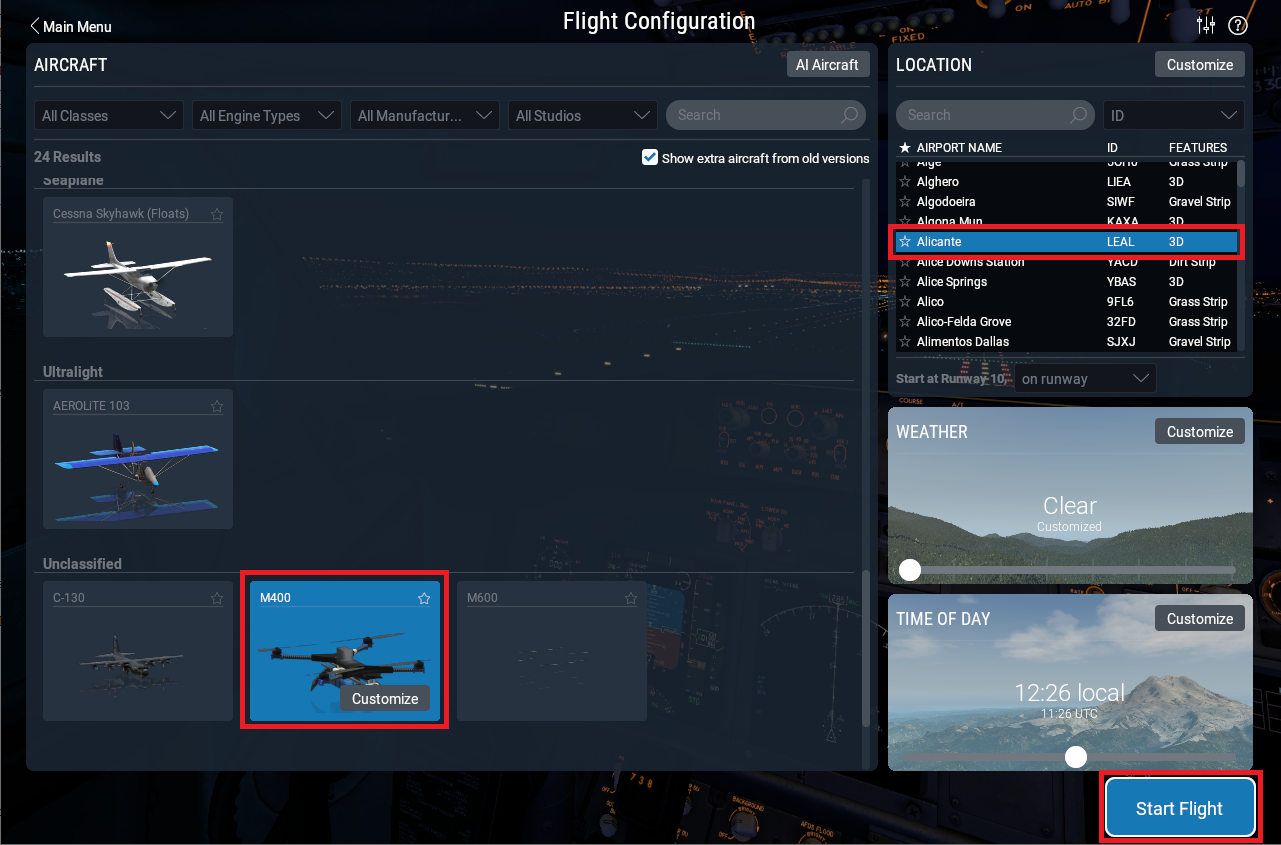
Open X-Plane 11. In this Main menu, click on New Flight to start a simulation:

Select which aircraft to use, the starting airport and weather conditions to simulate. Then, click on Start Flight to start the simulation:

X-Plane 11 Setup¶
Start HIL simulation
Once X-Plane is configured and running, click on
 of HIL Simulator to enable the sending of commands. The frequency to the simulator should then be set to, approximately, the previously configured frequency:
of HIL Simulator to enable the sending of commands. The frequency to the simulator should then be set to, approximately, the previously configured frequency: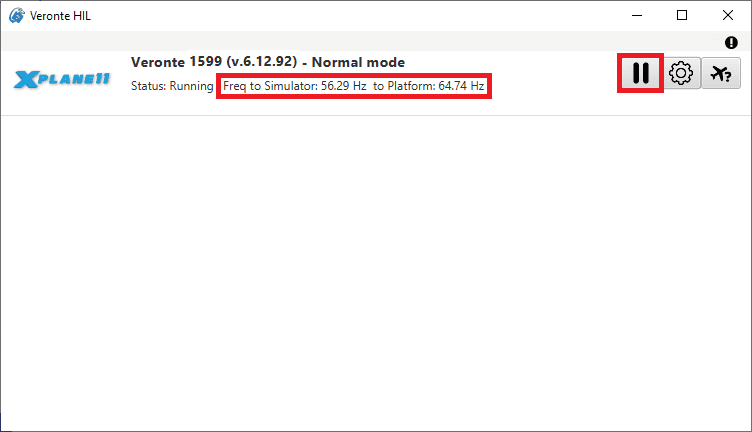
HIL - Run simulation¶
Check sending/receiving data
Go to Settings \(\Rightarrow\) Network tab. Check that the sending and receiving data to is correct:
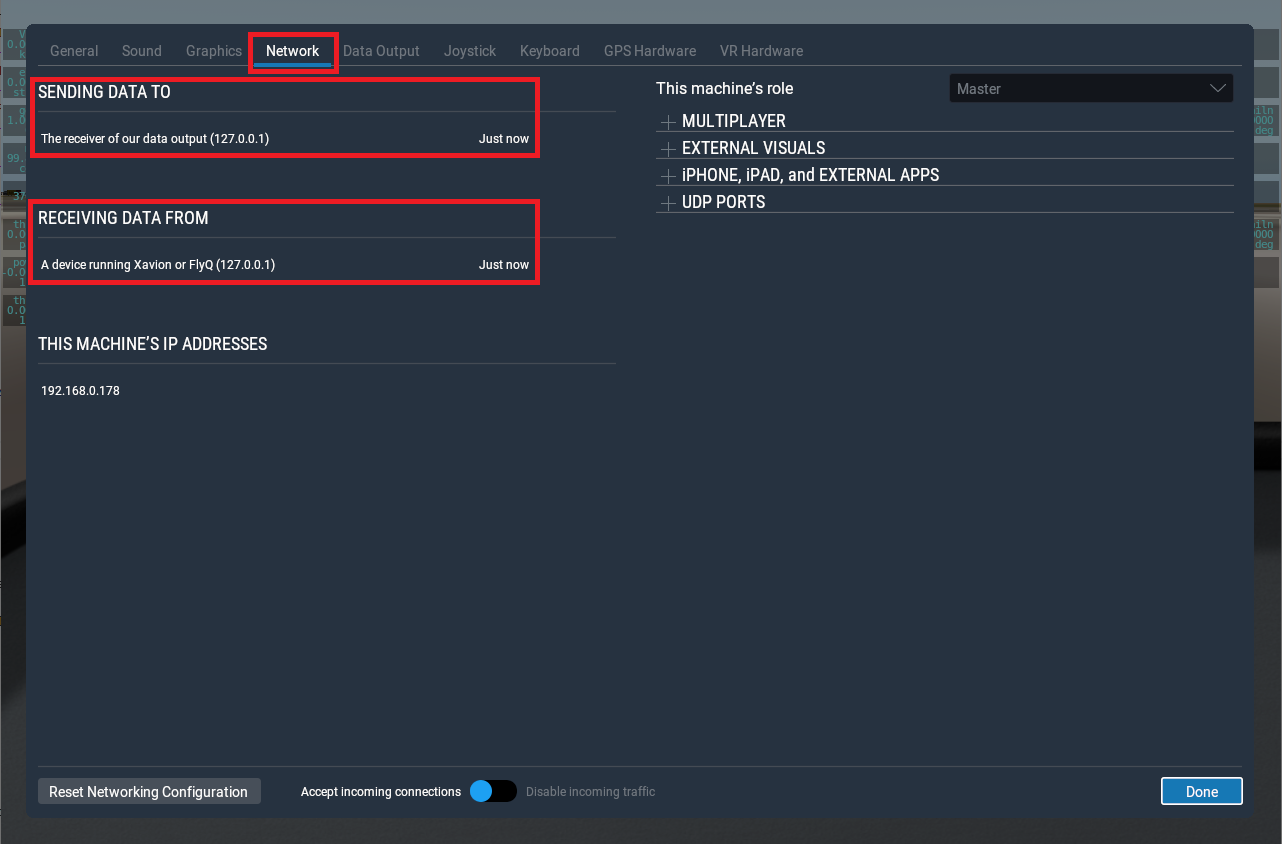

Check sending/receiving data¶
Once the hardware has been connected and the software has been configured, operation can start and the system can be operated as a real flight.

GPS will be simulated and the UAV should be visible on Veronte Ops in the selected airport, with a colored icon as follows:
Veronte Ops¶
Warning
The simulation starts when the aircraft is in the initial phase (when it is powered). In this phase, X-Plane will simulate the GPS signal to locate the autopilot.
With GPS signal it is possible to pass the system to Standby phase and to start flight. Once the aircraft has taken off from the airport on X-Plane, the automatic control will start and the aircraft will fly, according to the defined mission on Veronte Ops.
Note
For more information, read the Veronte Ops user manual.