Introduction¶
HIL Simulator is the Veronte application to perform HIL (Hardware In the Loop) simulations. This kind of simulation runs Veronte software with a real autopilot (1x or 4x), taking simulator input as real sensor data. The whole flight is controlled by the real autopilot in a virtual environment, making it the perfect tool for vehicle development and training operators in the use of Veronte autopilot, prior to conducting real flight operations.
HIL Simulator is designed for applications such as:
Pilot training.
Veronte configuration for unmanned platform control.
PID setting.
Mission configuration.
Aircraft performance validation.
The operator can fly the system as a real flight, being compatible with main Veronte features: real-time mission edit, in-flight automatic to manual control, flight data recording, etc. Sometimes, during an edition saving, the simulation fails because the simulation link suffers a little interruption (this fact does not exist in real flights).
Danger
When using HIL Simulator, real control actuators will move as a real flight. In order to avoid damaging people or equipment, make sure that motors are disconnected and there is no shock risk due to actuators movement.
HIL Simulator is employed along with:
Veronte Link to connect the autopilot with a computer. To read the user manual click here.
Veronte Ops to operate the autopilot during simulations. To read the user manual click here.
Simulators:
Microsoft Flight Simulator or X Plane 11 to simulate flights.
Bridge Command can be chosen for ship simulations.
Simulink for a customizable environment.
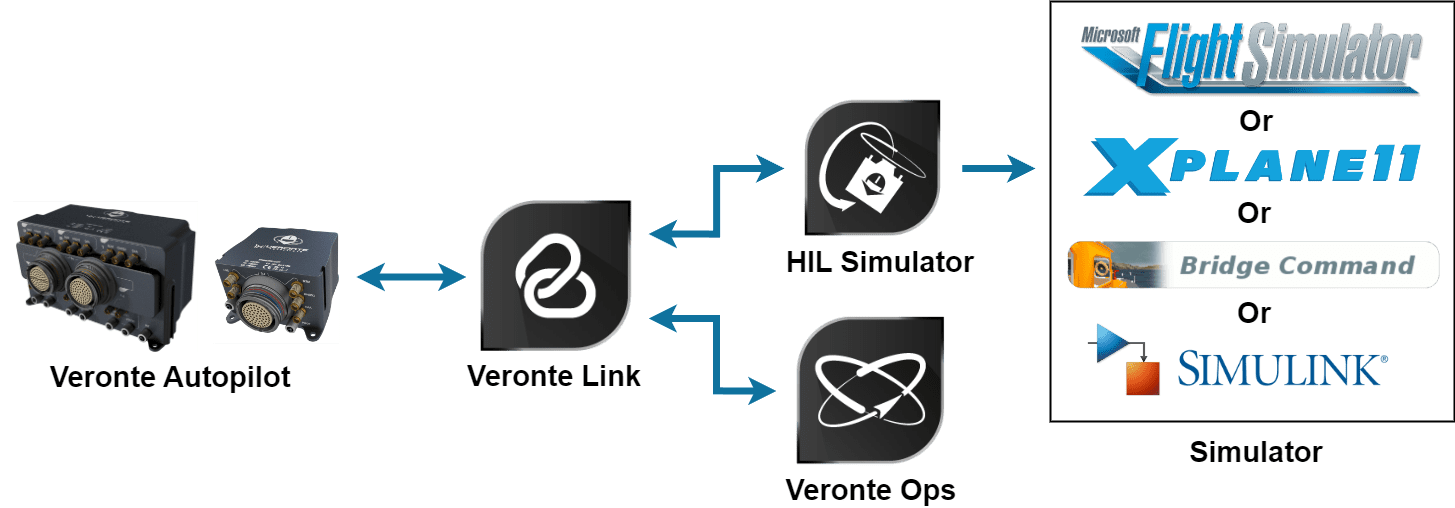
Applications Diagram¶