GNSS 1 & 2 Configuration¶
Configuration¶
This menu contains the parameters needed to configure the GNSS receiver 1-2 located in Veronte Autopilot.
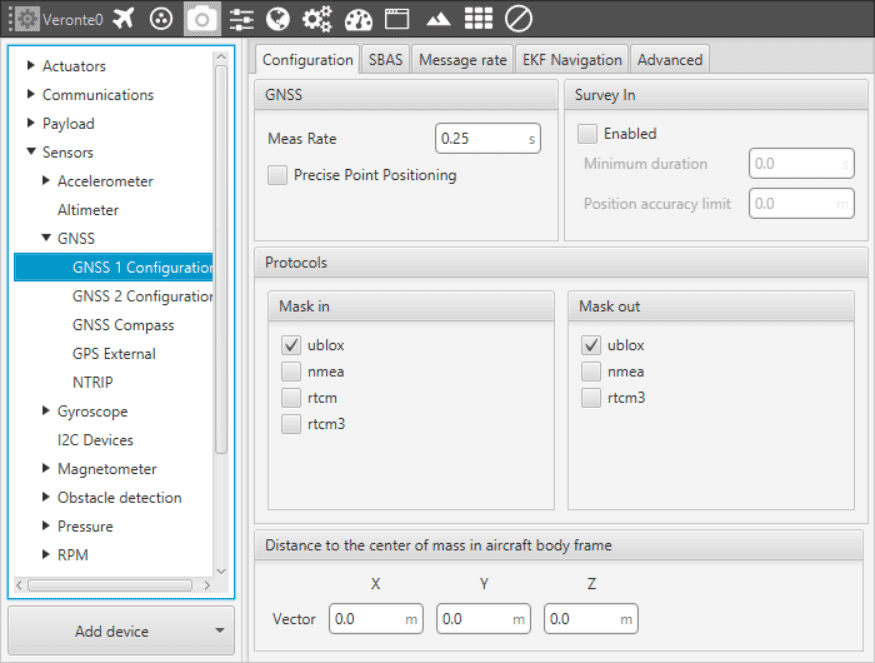
GNSS - Configuration Menu
The following parameters are configurable in this menu:
GNSS. Data values that can be configured.
Meas Rate. Defines the minimum time between data acquisition.
Precise Point Positioning (PPP). This option is a global precise positioning service, PPP is able to provide position solutions at centimetre to decimetre level after a few minutes with unobstructed sky view.
Survey in. Determines a stationary receiver’s position by building a weighted mean of all valid 3D position solutions. This mode should be activated in a Veronte Ground to enable GNSS Differential mode and send corrections to Veronte Air. Two requirements for stopping the procedure must be specified. Survey in procedure will end when both requirements are met.
Minimum duration. Defines a minimum amount of observation time regardless of the actual number of valid fixes that were used for the position calculation. Reasonable values range from one day for high accuracy requirements to a few minutes for coarse position determination
Position accuracy limit. Defines a limit on the spread of positions that contribute to the calculated mean.
Protocols. Allows the user to select the different comunication protocols as input or output. One port can handle several protocols at the same time (e.g. NMEA and UBX).
Protocols will be changed when using the GNSS Compass Wizard (see in Devices - GNSS - GNSS Compass).
Distance to center of mass. It is used to set the relative distance to the center of mass from the GNSS antenna in aircraft body axis. This parameter has to be set correctly in order to get a correct value when using GNSS Compass.
More information about protocols and configuration can be found here .
SBAS¶
SBAS stands for Satellite Based Augmentation System. It is a set of geostationary satellites that are used to check the status of the signals sent by the GPS Satellites, and to improve the tracking via the correction of atmospheric disturbations, orbit deviations, clock errors and so on. In Veronte Pipe, it is possible to select the satellites that will be used for this purpose (selecting the number that appears in the table of the following figure), or make the software to automatically choose them according to the location of the platform.
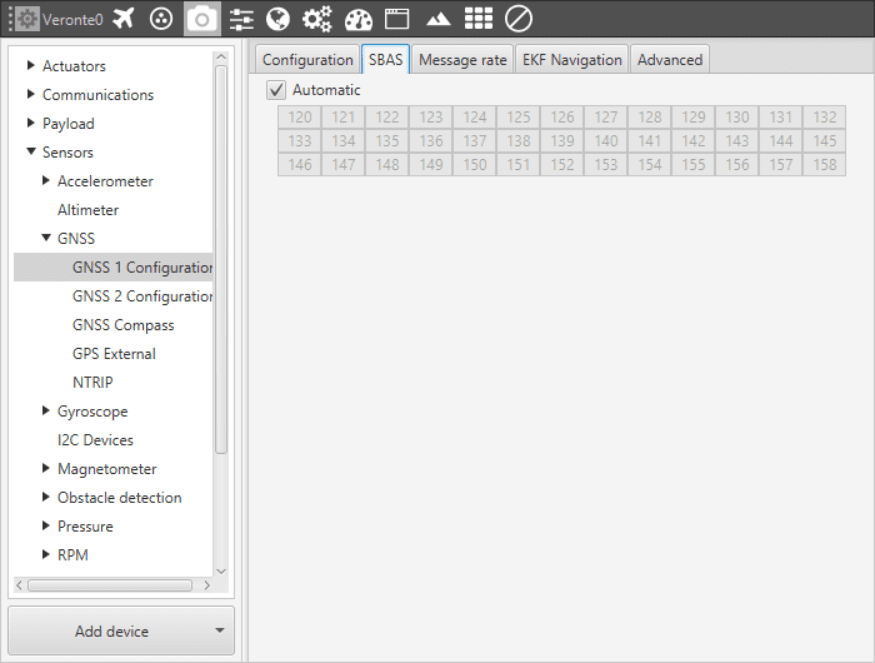
GNSS - SBAS Menu
Message Rate¶
The Message rate options are used to set the time between the messages received at the autopilot. Each one of the different messages can be configured separately: ECEF (earth centred, earth fixed reference system), LLH (latitude, longitude and height), Speed, GPS Time, SV Status (state of the GPS satellite) and so on. This messages will be changed when using the GNSS Compass Wizard (see in Devices - GNSS - GNSS Compass).
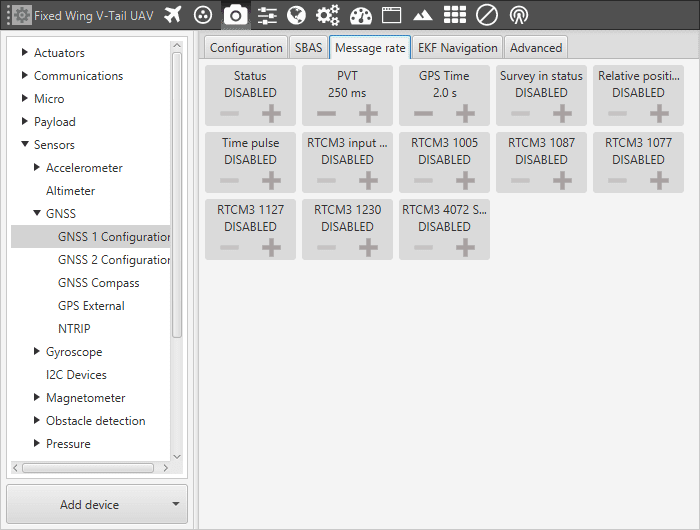
GNSS - Message Rate
For information about RTCM 3 message list can be found here .
Estimation Error¶
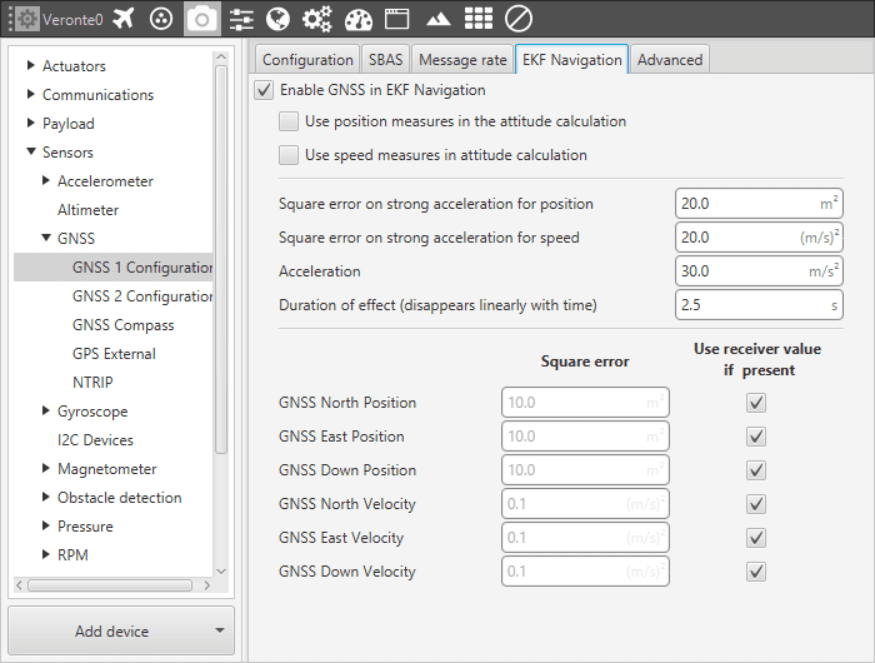
GNSS - Estimation Error
Enable check: Enables/Disables the usage GNSS solution in the Extended Kalman Filter. Veronte will keep receiving GNSS information from that module, but it will not be considered.
Use position measures in the attitude calculation: When enabled, the position data from the GNSS solution is considered for the attitude estimation.
Use speed measures in the attitude calculation: When enabled, the speed data from the GNSS solution is considered for the attitude estimation.
The variances considered in the EKF for the GNSS solution are by default the values provided by the GNSS receiver but can be modified for more complex scenarios.
GNSS North Position: Variance for the North component of the position solution.
GNSS East Position: Variance for the East component of the position solution.
GNSS Down Position: Variance for the Down component of the position solution.
GNSS North Velocity: Variance for the North component of the velocity solution.
GNSS East Velocity: Variance for the East component of the velocity solution.
GNSS Down Velocity: Variance for the Down component of the velocity solution.
Under strong accelerations the information provided by the GNSS does not represent the fast change of position and velocity therefore different variance must be considedred in the EKF.
Square error on strong acceleration for position: Under a strong acceleration the variance for the position solution it is changed to the specified value.
Square error on strong acceleration for speed: Under a strong acceleration the variance for the speed solution it is changed to the specified value.
Acceleration: Threshold definition. When this threshold is exceeded, strong acceleration variances are considered.
Duration of effect: Time needed to restore the default variances of the GNSS solution .
Advanced¶

GNSS - Estimation Error
Warning
Modifying these parameters can cause problems during the acquisition of GNSS positioning.
Minimum satellites number: Minimum number of satellites needed to have position fixed.
Maximum satellites number: Maximum number of satellites needed to have position fixed
Minimum satellite elevation: Minimum elevation of a satellite to be considered. Value in degrees.
PDOP mask: Maximum Position dilution of precision to consider the solution.
TDOP mask: Maximum Time dilution of precision to consider the solution.
P Acc mask: Maximum Position accuracy to consider the solution.
T Acc mask: Maximum Time accuracy to consider the solution.
Dynamic Model
The embedded receiver supports different dynamic platform models to adjust the GNSS navigation engine to the expected application environment. The settings improve the receiver’s interpretation of the measurements and thus provide a more accurate position output. Setting the receiver to an unsuitable platform model for the given application environment is likely to result in a loss of receiver performance and position accuracy.
Platform |
Description |
|---|---|
Portable |
Applications with low acceleration. |
Stationary |
Stationary applications. Velocity restricted to 0 m/s. Zero dynamics assumed |
Pedestrian |
Applications with low acceleration and speed. Low acceleration assumed. |
Automotive |
Used for applications with equivalent dynamics to those of a car. Low vertical acceleration assumed. |
Sea |
Recommended for applications at sea, with zero vertical velocity. Zero vertical velocity assumed. Sea level assumed. |
Airborne 1G |
Used for applications with a higher dynamic range and greater vertical acceleration than a car. |
Airborne 2G |
Recommended for typical airborne environments. |
Airborne 4G |
Recommended for extremely dynamic environments. |