GNSS
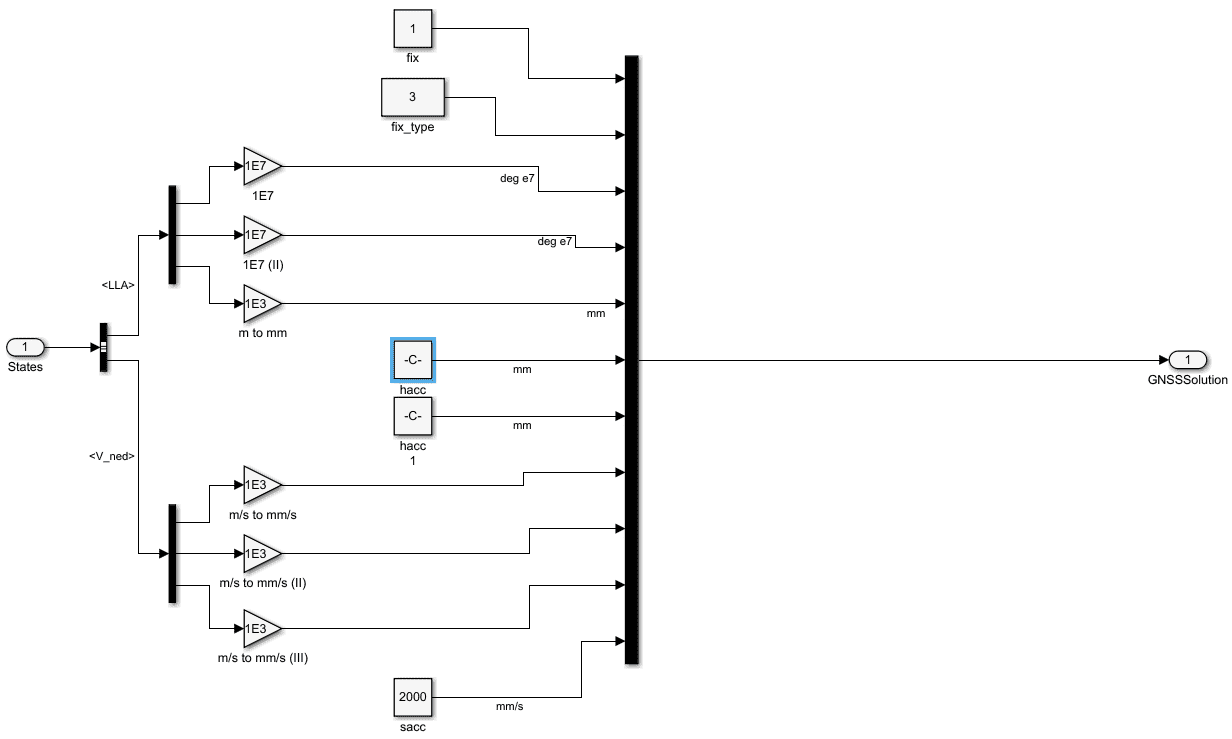
GNSS receiver ports (there are 2 ports, GNSS1 and GNSS2) expect to receive an array with the following information:
- Fix status
- Fix type
- 0: no fix
- 1: dead reckoning only
- 2: 2D-fix
- 3: 3D-fix
- 4: GNSS + dead reckoning fix
- Longitude
- Latitude
- Altitude
- Horizontal accuracy
- Vertical accuracy
- North Velocity
- East velocity
- Down Velocity
- Speed Accuracy
Note
- The angle inputs are in degrees · 10⁷ units.
- The distance inputs are in millimetres units.
- The speed inputs are in millimeters per second units.
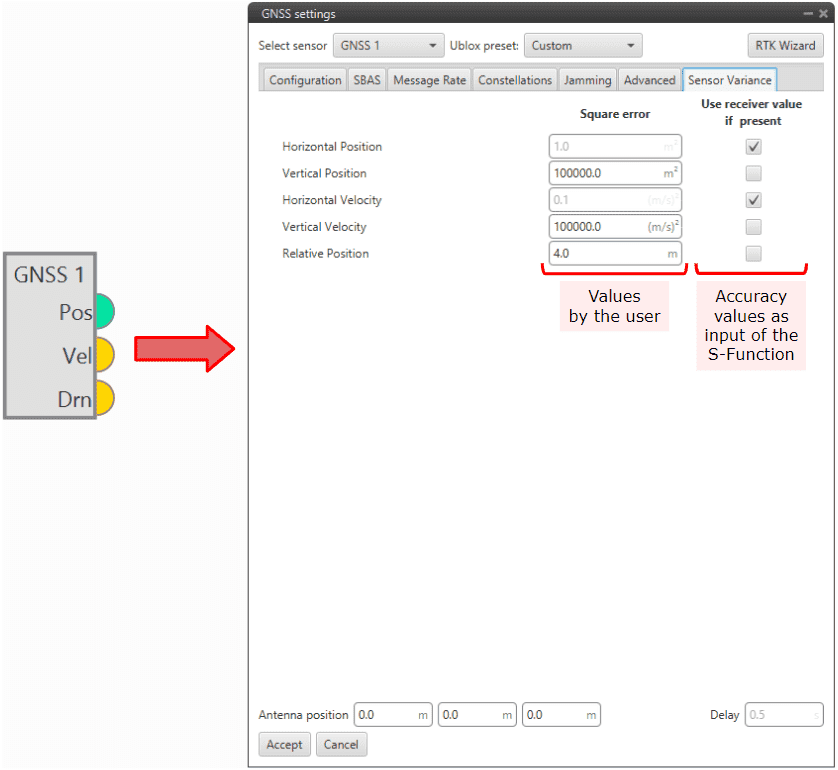
The accuracy values are equal to the square root of the "Square error" parameter. These values are supposed to be computed by the GPS device and are used in the EKF for GNSS solution. However, in the configuration files user can choose between these ones or values set by user.
RTK Example Block
To enable the RTK feature, the user has to modify the configuration (for more information on this, see GNSS sensor block - Block Programs section of the 1x PDI Builder user manual), and include more inputs via the S-Function.
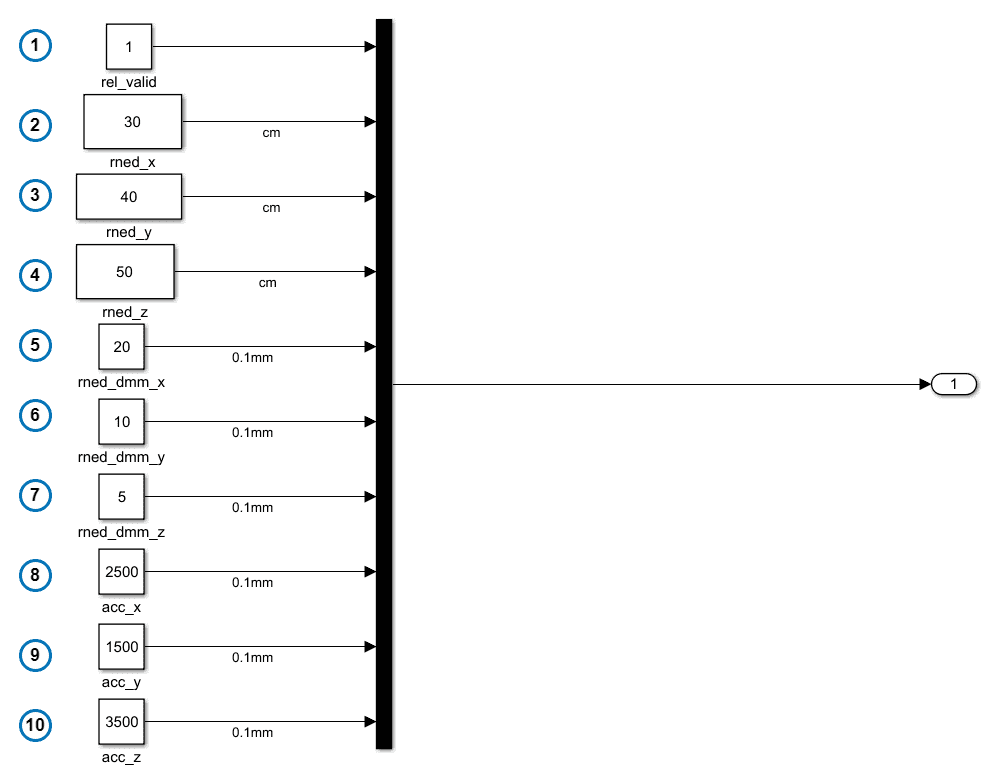
This input is called Relative Position, and requires an array of 10 elements:
- Status: 0 is Data invalid and 1 is Data valid.
- RelPosN: North component of relative position vector (cm)
- RelPosE: East component of relative position vector (cm)
-
relPosD: Down component of relative position vector (cm)
Note
RelPos represents the relative position between two GNSS antennas, the vector between the primary and secondary antenna. This position is composed of RelPosN, RelPosE, RelPosD.
-
relPosHPN: High precision North component (mm)
- relPosHPE: High precision East component (mm)
- relPosHPD: High precision Down component (mm)
- accN: Accuracy of relative position North component (mm)
- accE: Accuracy of relative position East component (mm)
- accD: Accuracy of relative position DOwn component (mm)
High precision components must be in range -99 to 99 millimetres. The full component of the relative position vector (in cm) is given by the addition of the 2 components.
Note
The relative position vector is only required when the GNSS Compass is implemented.
An example of this subgroup is shown below: