Hold¶
Hold guidance algorithm allows the user to introduce a desired variable value that has to be followed or held by the platform. It differs from the other guidances where the user sets a path to follow and the aircraft follows the track commanding the desired heading, velocities, etcétera, which is determined by the control algorithm. Here, the aircraft will hold a velocity (IAS,TAS,…), a heading, a flight path angle, a roll, pitch and yaw angle, … or a constant distance to a moving Object of Interest, for example.
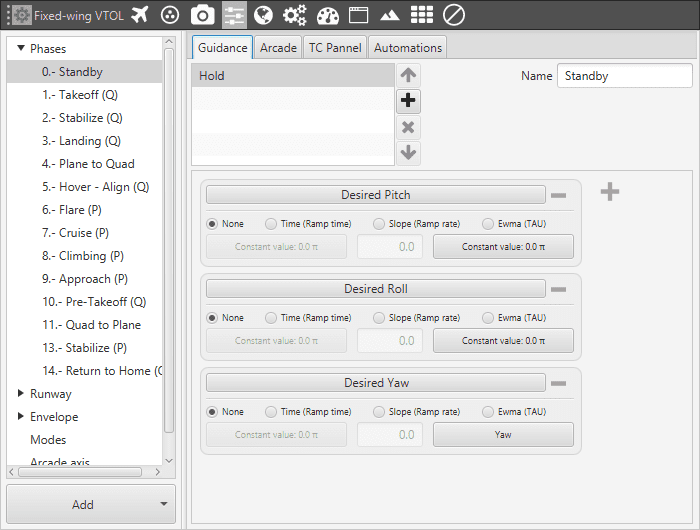
Hold Guidance Example in Standby phase
There are 4 ways in Pipe to determine how the variable is introduced in the controller in a Hold Guidance:
None. A simple value is specified. As soon as the aircraft enters in the phase that has this hold guidance, the desired variable will take the value specified in this option. It is possible to define a constant value for the desired variable, or take the value that another variable has at the instant when the aircraft enters in that phase. Lets see some examples:
To make the aircraft keep the heading that it has when changing phase, select Desired Heading as the hold variable, and choose heading. This is useful, for example, when the aircraft looses GNSS signal. You can set an automation that jumps to this phase to hold the flight path.
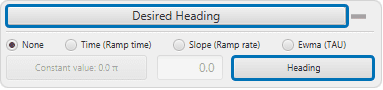
Hold Heading
Hold is also useful in the Standby phase to check the correct setting of the servos of the aircraft. During this phase, if this is configured, the user can manually move the aircraft and the autopilot will try to counteract this change of attitude commanding movement to the corresponding servos:
Standby phase Hold guidance
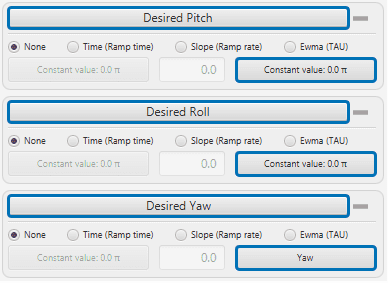
Another common application of this Hold guidance is the Arcade Mode for multicopters. Multicopters need assistance to fly as they are inherently unstable. Here are presented two strategies: hold attitude or hold position.
Hold attitude will correct the angles of the multicopter to keep it stable when the stick is released, but the aircraft will continue moving due to inertia.
Hold multicopter attitude
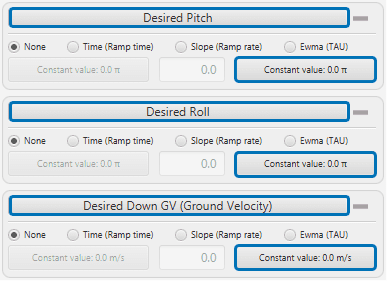
To hold aircraft’s position, a good strategy is to set a Velocity Hold (or VHold). This adds another layer to the control algorithms. Setting velocities to zero will stop the vehicle in place when the stick is released.

Hold multicopter position
..note: This Hold guidances examples lack of Yaw control as it is included in the phase with other guidance control.
Time (Ramp Time). In this case the desired variable introduced in the controller will take first the value (or the variable) introduced. After a certain time established, the variable will reach the value indicated.
Slope (Ramp Rate). The same as before, but now instead of the time between the two values of the ramp, the slope of the linear ramp can be indicated.
Ewma (TAU). The variation between the start and final values is exponential.
These type of transitions are useful to avoid sending aggressive control commands to the aircraft that can damage the structure or set the aircraft in a compromising situation. For example, this can be used in the flare maneuver before the aircraft’s touchdown during landing. The aircraft, which is flying at a very low speed height must reduce its vertical down velocity. A time ramp can be set to reduce it from the actual velocity at which the plane enters this phase to the desired one.