Technical¶
Variants¶
Veronte MC01 has to variants or versions. Both have the same hardware, nonetheless the software is different.
MC01B - Brushless variant: for brushless motors.
MC01S - Stepper variant: for stepper motors.
General features¶
Compact design
Lightweight
Low energy consumption
Very quick reaction
Support for encoders
Gyro-stabilisation
Control algorithm: Proportional Integral Derivative (configurable gains)
Dimensions: 60x25x15mm
Weight: 10g
- Redundant Isolated CAN Expansion
2x CAN for critical actuators - two wires each one
No power wires required (optional)
- Auxiliary Power Outputs
1x 5V DC
1x 3.3V DC
- Embedded Sensors
Input voltage
Board temperature
Communication buses
1x CAN
1x I2C
- Input / Output
4x GPIO (on/off)
2x PWM / ECAP
- Supported encoders
SPI Differential
SPI
Digital (ECAP and EQEP)
Part List¶
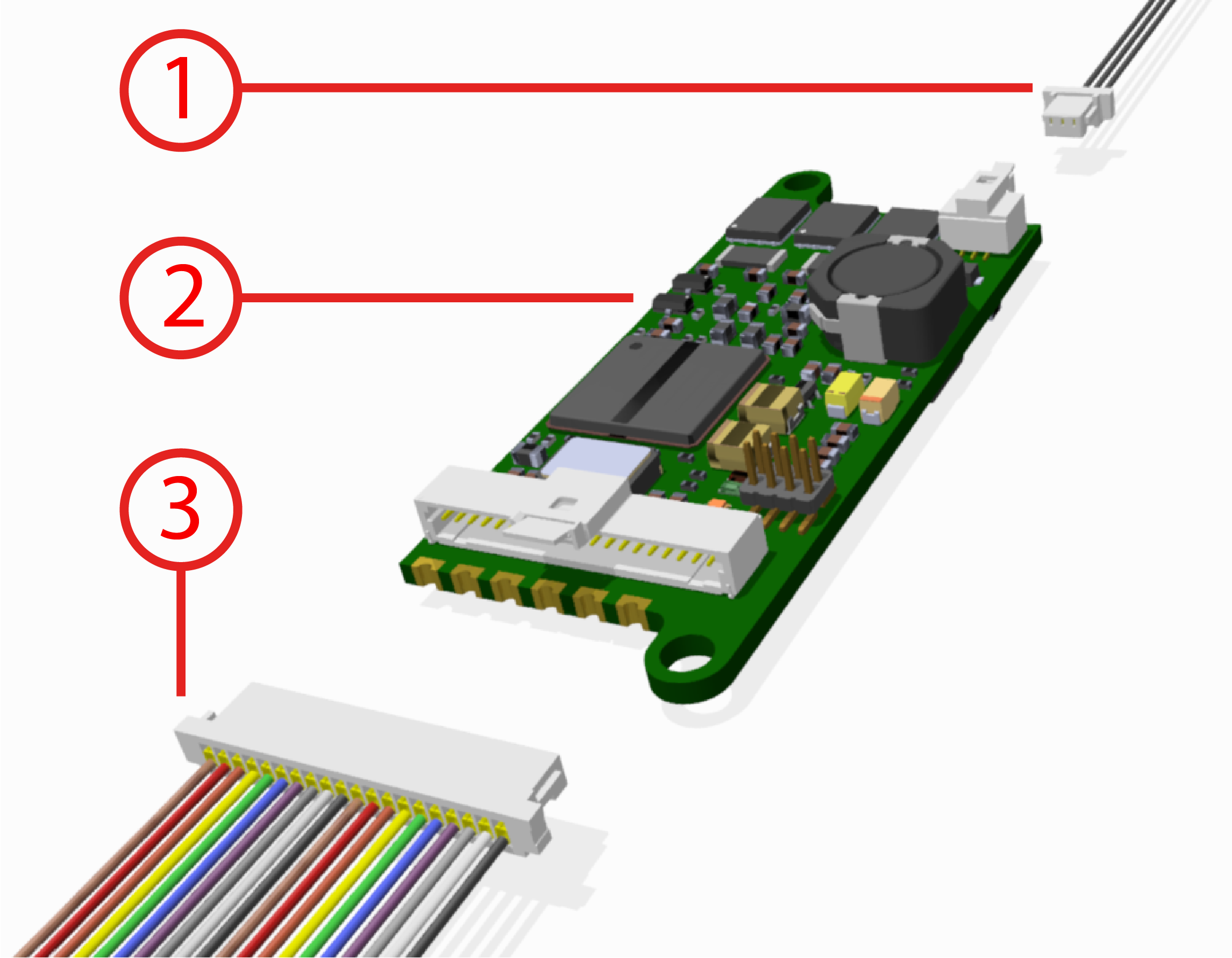
Number |
Description |
Commercial reference |
|---|---|---|
1 |
Connector with 3 pins |
S1SS-03-28-GF-07_00-L |
2 |
Veronte MC01 controller |
|
3 |
Connector with 20 pins |
S1SS-20-28C-GF-11_00-L |
Dimensions¶
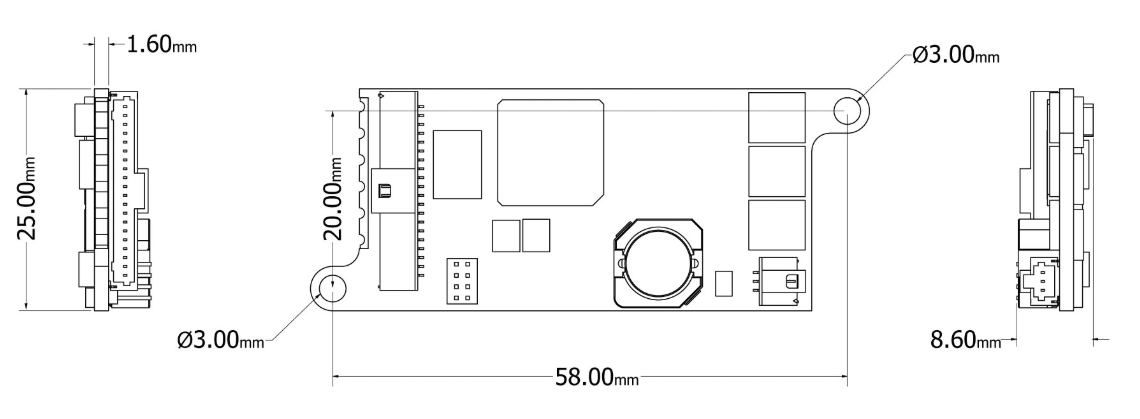
Veronte MC01 board dimensions
Electrical specifications¶
- Motor
Voltage: same as input. 3-phase brushless interface.
- EQEP encoder
32-bit QEP channels.
- PWM/ECAP
Maximum voltage: 3.3V.
Maximum input current: 2.5 mA.
Sampling rate: up to 1 micro s.
- Auxiliary 3.3V output
Non-protected output – Light loads.
- Auxiliary 5V output
Non-protected output – Light loads.
- CAN
Complies with standards.
Non-Isolated.
Speed up to 1 Mbps.
- I2C
3.3V Signals up to 400 KHz.
- Power Input
Vmax = 24V DC.
IMax: 3A. Depends on the motor.
Inom: 0.3A (motor not working).
Typical Input Current: 1.5A.
- SPI encoder
Maximum and minimum voltage: +12 to -12V.
Addon for isolated CAN transceivers – New board soldered.
Interfaces¶
The only connections required are the connectors shown in the Part List section.