Embention Manuals Site
On this site the user can find all our user manuals organised by product category. The hardware manual is the main document for each product that the user should read firstly.
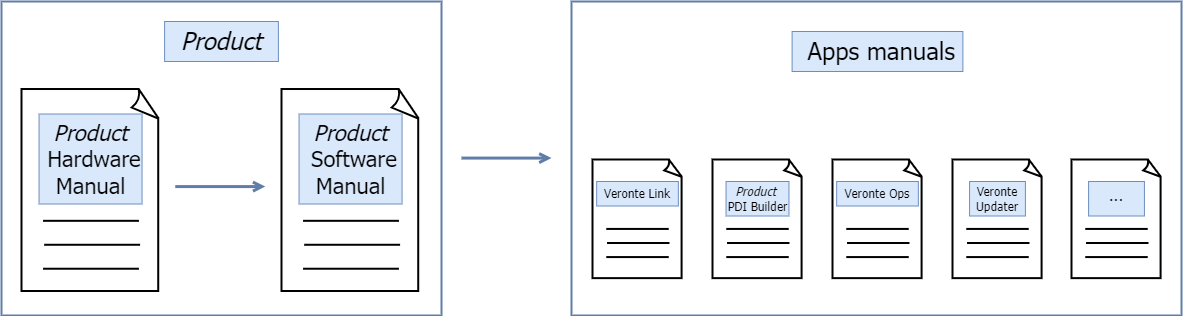
In addition, the manuals for each product have been divided into hardware, software and application manuals. Below is a generic diagram that may be useful to understand this concept:
Users will find the following sections in hardware manuals:
- Introduction: Brief description of the product.
- Quick Start: Description of the product's context of use, first steps, warnings and requirements.
- Technical: Features, variants, sensor, mechanical and electrical specifications and interfaces information.
- Hardware Installation: Mechanical assembly and electrical information.
- Software Installation: Connection required to use the software and a link to the product software manual.
- Operation: Use of the product during operation.
- Maintenance: Hardware and software maintenance of the product.
- Integration examples: Hardware integration of other products with this product.
- Troubleshooting: How to deal with common faults or problems with the product.
- Hardware Changelog: Changes in the current version of the product compared to the previous version.
- Acronyms and Definitions
- Contact Data
Users will find the following sections in software manuals:
- Software applications: Brief description of all the applications this product can work with, along with a link to the corresponding user manual.
- List of variables: List of all the variables of this product together with their corresponding descriptions.
- CAN Bus protocol: Structure of CAN messages together with examples specific to this product.
- Firmware Changelog: Changes between firmware versions of the product.
Users will find the following sections in apps manuals:
- Quick Start: Description, requirements and procedure for downloading and installing this application.
- Configuration: Configuration options offered by the application.
- Operation: Use of the app during operation.
- Integration examples: Examples of how to configure the app to integrate this product for a specific use or with external devices.
- Troubleshooting: How to deal with common errors or problems of the app.
- FAQ: Users can consult the most frequently-asked questions about this application.
- Software Changelog: Changes in the current version of the app compared to the previous version.