Software applications¶
Due to the elements present in the Autopilot 4x system (Arbiters and Autopilots 1x), the software applications with which 4x works along are the ones listed below.
The following diagram summarizes the operation regarding these applications:
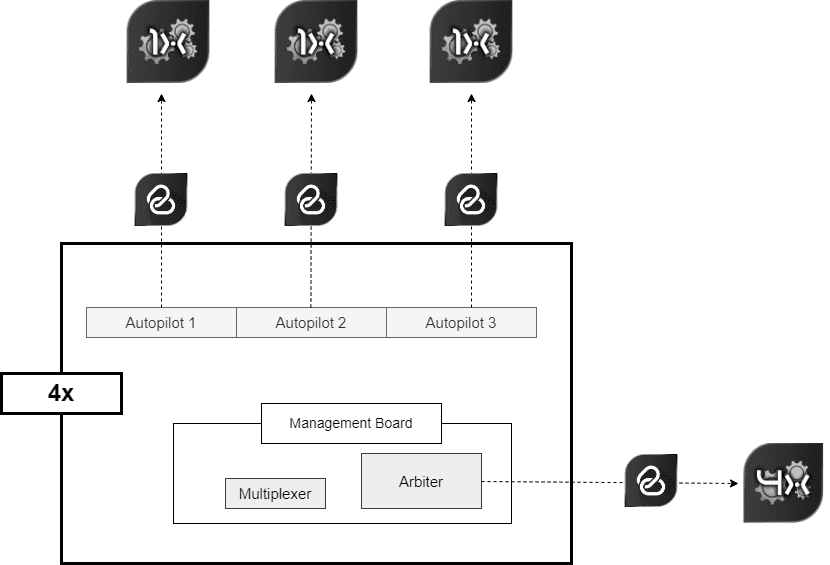
4x application diagram¶
Veronte Link¶
Each inner Autopilot 1x and the Arbiter must be configured individually. First of all, a connection to a computer is required employing Veronte Link. All devices can be connected one by one or simultaneously, since Veronte Link is able to manage multiple connections.
For more information, read the user manual for Veronte Link.
1x Software Manual¶
To operate individually any Veronte Autopilot 1x, read the 1x Software Manual, since all software applications are applicable to Autopilot 4x.
1x PDI Builder¶
Each internal Autopilot 1x must be configured with 1x PDI Builder, it allows to adapt the autopilot to a specific vehicle, including user-defined commnication protocols. 1x PDI Builder includes:
Telemetry: real-time onboard UAV metrics, such as sensors, actuators and control states.
Configuration: edit vehicle settings, such as servo trim, interface/port management and modes.
Automations: actions that are automatically executed when a set of configured conditions are accomplished.
Block Programs: Veronte Autopilot 1x can be programmed with a friendly-user programming language.
For more information, read the user manual for 1x PDI Builder.
4x PDI Builder¶
4x PDI Builder allows to configure the Arbiter communications, including CAN buses and input/output signals. It also configures the criterion to select the autopilot which controls the aircraft.
For more information, read the user manual for 4x PDI Builder.