IMUs & Compass
IMUs
Vectornav VN-300

Vectornav VN-300 is an external IMU that can be connected via RS-232 (serial interface) to Veronte Autopilot 1x.
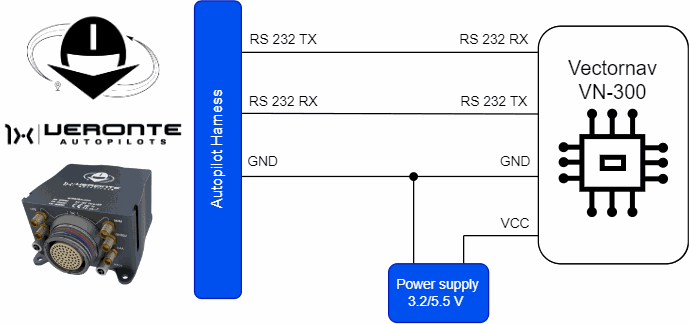
Important
Note that it must be connected to an external power supply, sharing signal ground with Autopilot 1x.
| Autopilot 1x Harness | VectorNav VN-300 Connector | |||
|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal |
| 19 | RS232 TX | White-Pink | 1 | RX1 |
| 20 | RS232 RX | Pink-Brown | 2 | TX1 |
| 21 | GND | White-Blue | 5 | GND |
Note
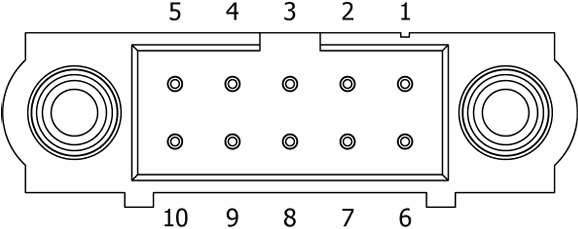
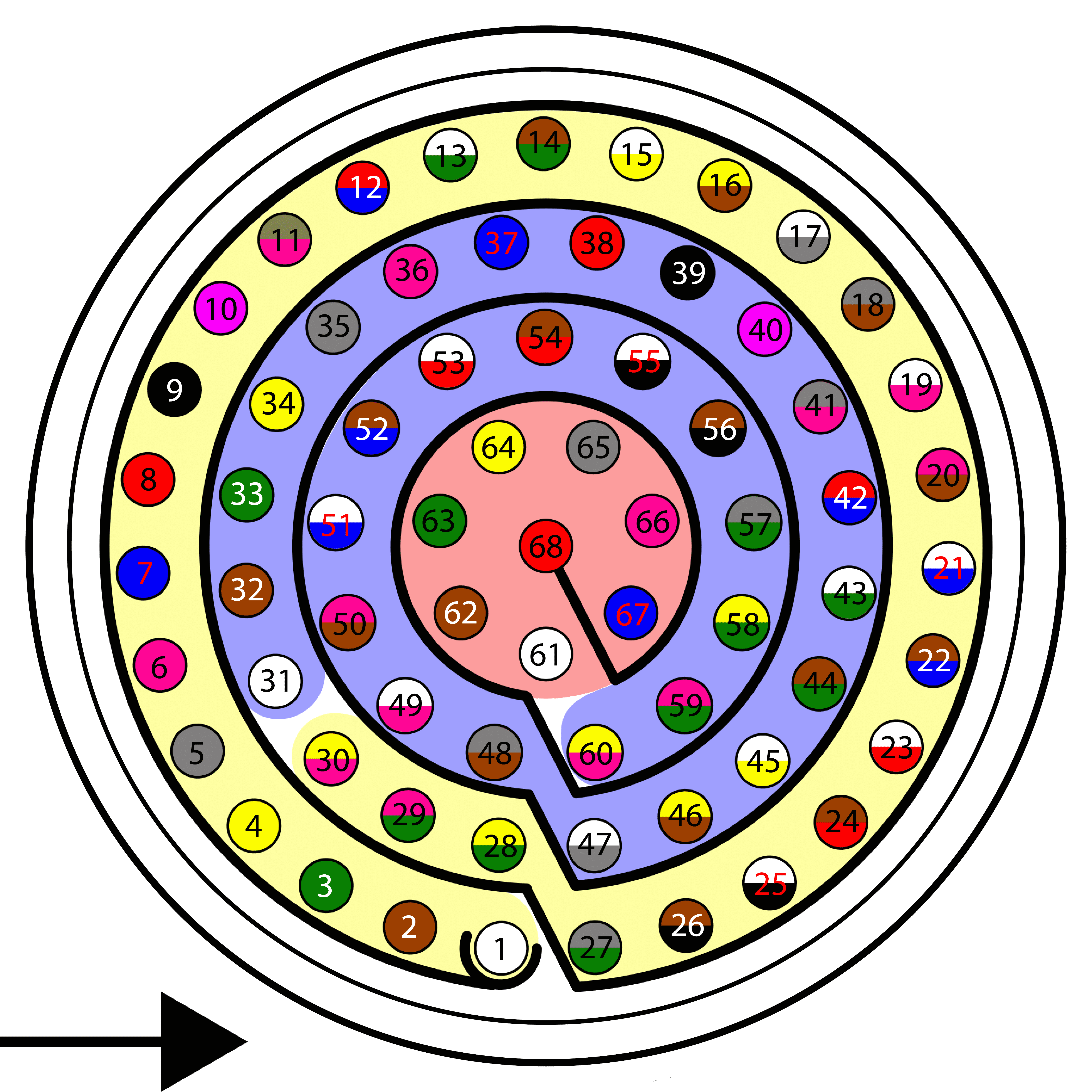
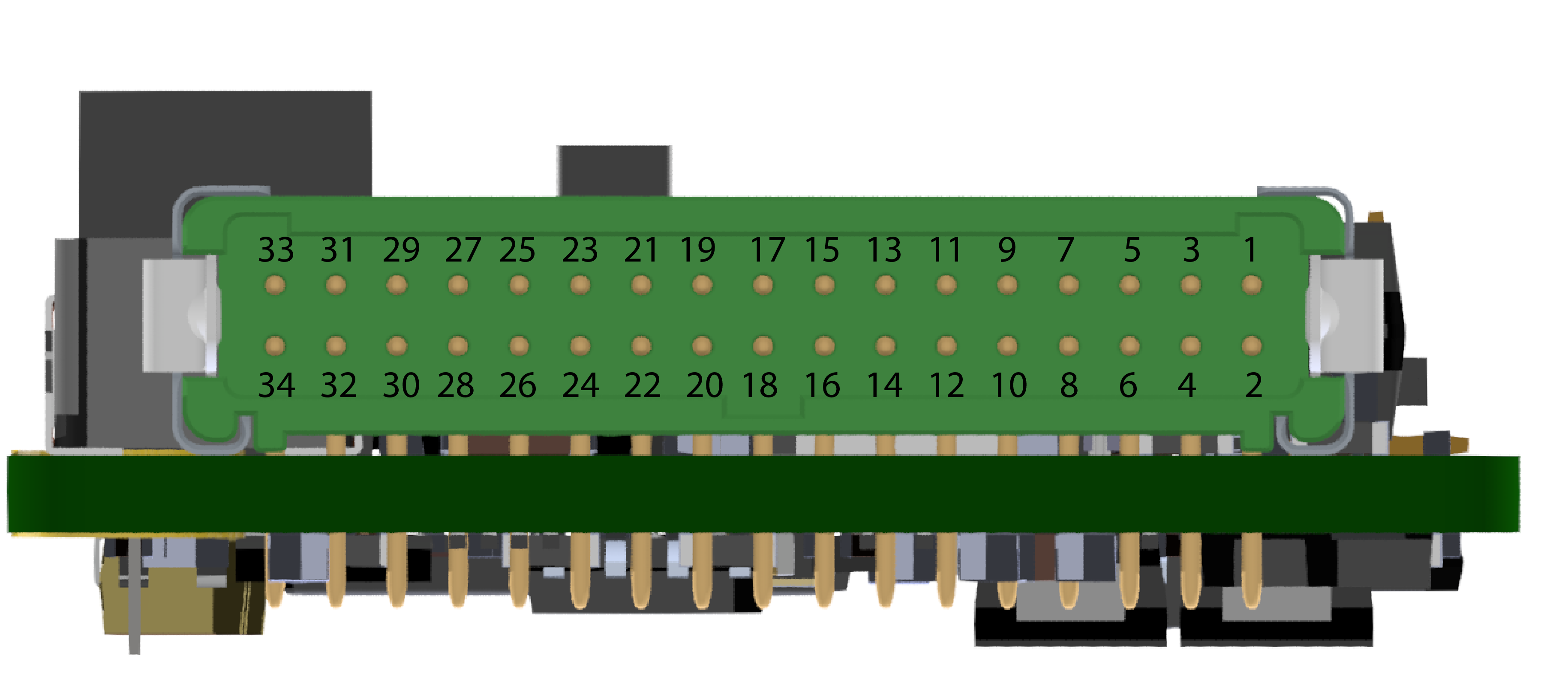
For more information about these pins, refer to the Pinout - Hardware Installation section of the present manual.
Warning
Remember!! In Autopilot 1x, all GND pins are common. Note that pin 54 is not a common GND pin.
Once the IMU is connected, the user must proceed to its software integration with Veronte Autopilot 1x by referring to the Vectornav VN-300 - Integration examples of the 1x PDI Builder user manual.
WitMotion HWT905-232

Vectornav VN-300 is an external IMU that can be connected via RS-232 (serial interface) to Veronte Autopilot 1x.
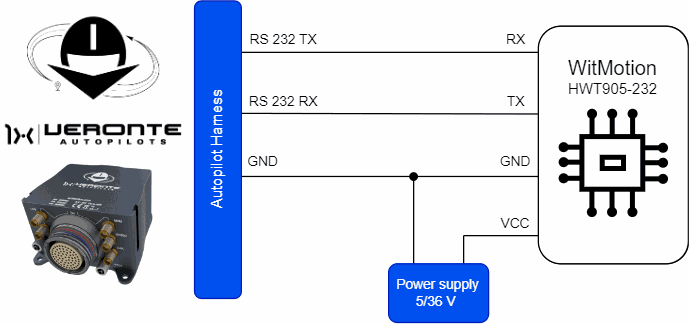
Important
Note that it must be connected to an external power supply, sharing signal ground with Autopilot 1x.
| Autopilot 1x Harness | WitMotion HWT905-232 Connector | ||||
|---|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal | Color Code |
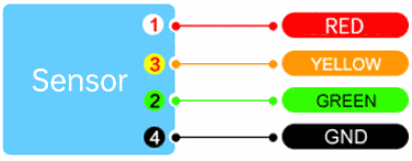
| 19 | RS232 TX | White-Pink | 2 | RX | Green |
| 20 | RS232 RX | Pink-Brown | 3 | TX | Yellow |
| 21 | GND | White-Blue | 4 | GND | Black |
Note
For more information about these pins, refer to the Pinout - Hardware Installation section of the present manual.
Warning
Remember!! In Autopilot 1x, all GND pins are common. Note that pin 54 is not a common GND pin.
Once the IMU is connected, the user must proceed to its software integration with Veronte Autopilot 1x by referring to the WitMotion HWT905-232 - Integration examples of the 1x PDI Builder user manual.
Magnetometers
MEX External Magnetometer
MEX can be used as an external magnetometer connected to Veronte Autopilot 1x via serial (RS232/RS485) or CAN interfaces.
Connections via CAN, RS232 and RS485 interfaces are explained separately.
CAN
For proper operation via CAN, the connection between MEX and Autopilot 1x pins should be like this:
| Autopilot 1x Harness | MEX Connector | |||
|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal |
| 25 | CANA_P | White-Black | 22 | CAN A (P) |
| 26 | CANA_N | Brown-Black | 23 | CAN A (N) |
| 28 | CANB_P | Yellow-Green | 20 | CAN B (P) |
| 29 | CANB_N | Pink-Green | 21 | CAN B (N) |
| 30 | GND | Yellow-Pink | 24 | CAN GND |
Note
If only CAN A or CAN B has been configured in the software for communications, only the corresponding pins must be connected.
For more information on CAN connection, please visit CAN - Wiring connection section of this manual.
Warning
Remember!! In Autopilot 1x, all GND pins are common. Note that pin 54 is not a common GND pin.
Important
Integration is also possible by connecting CAN A of the Autopilot 1x to CAN B of the MEX and vice versa, i.e. it does not necessarily have to be CAN A-CAN A or CAN B-CAN B.
However, any connections made must be consistent with the configuration made at software level in 1x PDI Builder and MEX PDI Builder.
RS232
For proper operation via RS232, the connection between MEX and Autopilot 1x pins should be like this:
| Autopilot 1x Harness | MEX Connector | |||
|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal |
| 19 | RS232 TX | White-Pink | 16 | RS-232 (A) RX |
| 19 | RS-232 (B) RX | |||
| 20 | RS232 RX | Pink-Brown | 15 | RS-232 (A) TX |
| 18 | RS-232 (B) TX | |||
| 21 | GND | White-Blue | 17 | GND |
Note
For more information about these pins, refer to the Pinout - Hardware Installation section of the present manual.
Warning
Remember!! In Autopilot 1x, all GND pins are common. Note that pin 54 is not a common GND pin.
Important
Integration is possible by connecting the RS-232(A) or RS-232(B) from MEX to the RS232 of Autopilot 1x.
However, any connections made must be consistent with the configuration made at software level in 1x PDI Builder and MEX PDI Builder.
RS485
For proper operation via RS485, the connection between MEX and Autopilot 1x pins should be like this:
| Autopilot 1x Harness | MEX Connector | |||
|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal |
| 50 | OUT RS485 A_P | Pink-Brown | 33 | IN RS-485 (P) |
| 51 | OUT RS485 A_N | White-Blue | 31 | IN RS-485 (N) |
| 52 | IN RS485 A_N | Brown-Blue | 32 | OUT RS-485 (N) |
| 53 | IN RS485 A_P | White-Red | 30 | OUT RS-485 (P) |
| 54 | OUT_GND | Brown-Red | 34 | RS-485 GND |
Warning
Note that, in Autopilot 1x, this pin 54 is not a common GND pin.
Note
- The user has the option to configure either of the two available RS-485 lines on the Autopilot 1x: RS 485 A or RS 485 B. For more information about these pins, refer to the Pinout - Hardware Installation section of the present manual.
- If users encounter any problems during wiring, please check the Half-duplex servo does not respond - Troubleshooting section of this manual.
Important
Any connections made must be consistent with the configuration made at software level in 1x PDI Builder and MEX PDI Builder.
PNI RM3100
PNI RM3100-CB magnetometer must be connected to Autopilot 1x via I2C.
Important
This integration example is described for the RM3100-CB.
| Autopilot 1x Harness | PNI RM3100-CB Connector | |||
|---|---|---|---|---|
| PIN | Signal | Color Code | PIN | Signal |
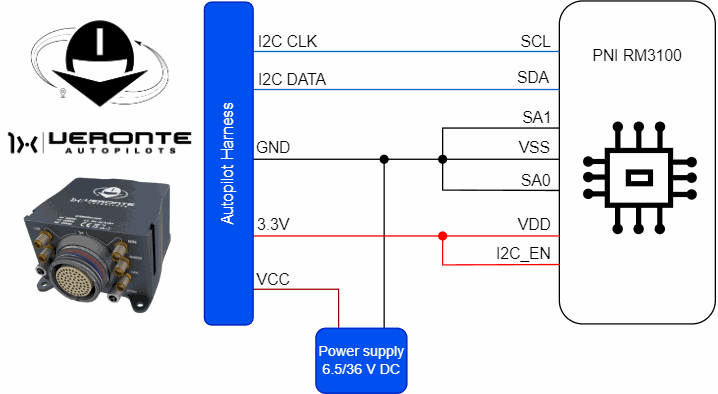
| 31 | I2C_CLK | White | 1 | SCL |
| 32 | I2C_DATA | Brown | 3 | SDA |
| 33 | GND | Green | 4 | VSS Ground |
| 2 | SA1 Bit 1 of slave address |
|||
| 7 | SA0 Bit 0 of slave address |
|||
| 34 | 3.3V | Yellow | 8 | VDD Supply Voltage |
| 5 | I2C_EN I2C enable pin (HIGH = I2C) |
|||
Warning
Remember!! In Autopilot 1x, all GND pins are common. Note that pin 54 is not a common GND pin.
Once the magnetometer is connected, the user must proceed to its software integration with Veronte Autopilot 1x by referring to the PNI RM3100 - Integration examples section of the 1x PDI Builder user manual.
© 2026 Embention. All rights reserved.