Automations
Automations are actions that are carried out when a combination of events happens, i.e., when the events are accomplished the action is done. For more information on automations, visit the Automations section of the 1x PDI Builder user manual.
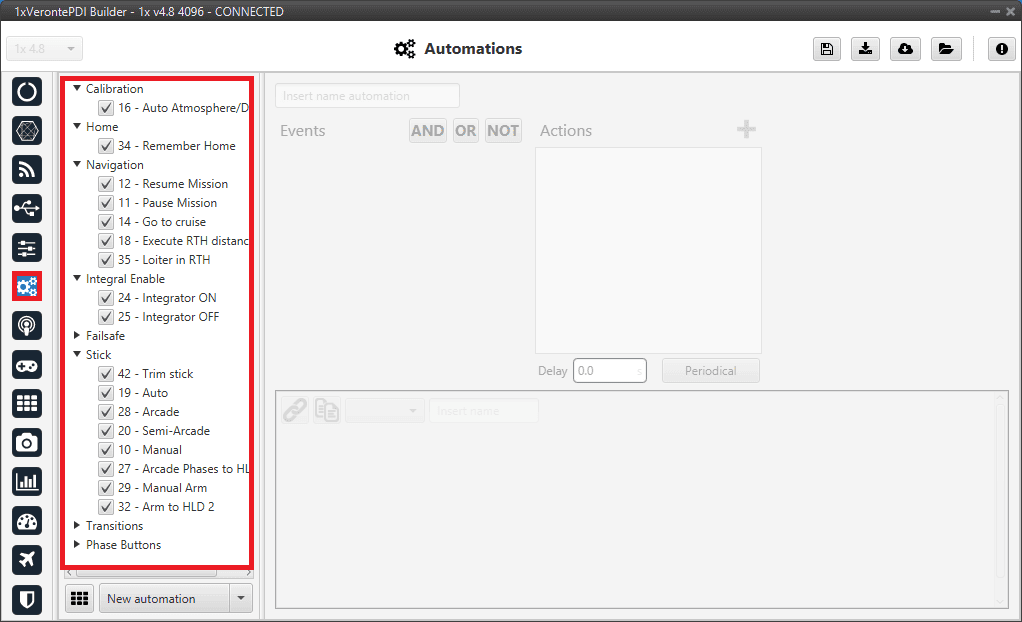
The different events, actions and automations that have been created for the operation of the Embention VTOL aircraft are shown below.
Warning
The user can create as many automations as desired up to a maximum of 500 events, 120 actions and 100 automations.
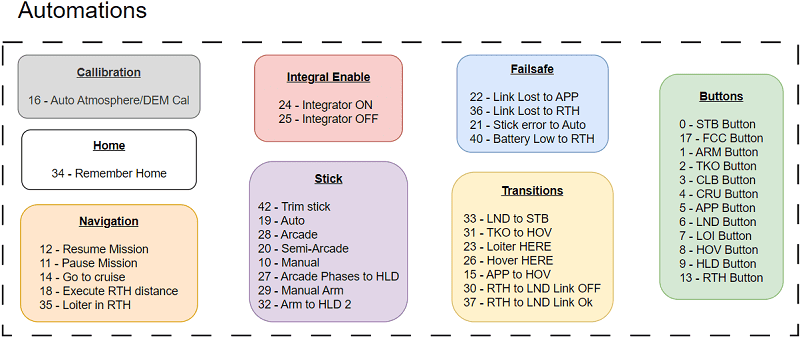
The automations have been divided into groups depending on the functionality for which they have been created:
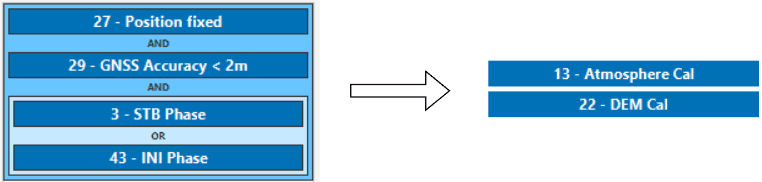
Calibration
16 - Auto Atmosphere/DEM Cal
This automation establishes the events that must be triggered for the autopilot to perform an atmospheric calibration. For this, the autopilot position must be fixed, with a GNSS accuracy of less than 2 meters, and be in the STB or INI phase.
Home
34 - Remember Home
This automation remembers the take-off point. In the RTH phase, the autopilot guides the aircraft to the nearest Home point, so if no other point has been established in the mission, the autopilot will automatically establish a path to guide the aircraft back to the take-off point.

Navigation
-
18 - Execute RTH distance
When the autopilot is in RTH phase, it executes the program RTH distance ok which calculates the distance to the nearest Home point.

-
35 - Loiter in RTH
This automation allows the aircraft to perform a Loiter when it is in RTH phase and does not meet the conditions to take the RTH point as correct.

Integral Enable
The following automations set the value of the Integral Enable bit, which is used as the value for the enable integral input of the PID controllers used in Rates to control program.
-
24 - Integrator ON

When Integral ON is triggered, a value of 1 is stored in the Integral Enable bit, turning true. Therefore, the enable integral input of the PDI controller is true, which means that the PDI works as usual.
-
25 - Integrator OFF
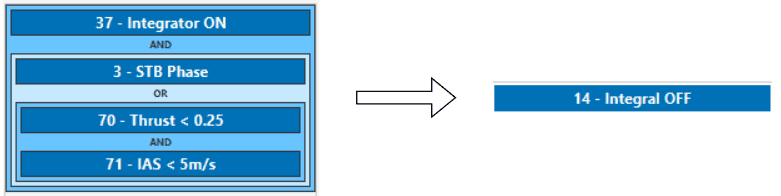
When Integral OFF is triggered, a value of 0 is stored in the Integral Enable bit, turning false. Therefore, the enable integral input of the PDI controller is false, which implies that the integral term is exponentially discharged.
Failsafe
The following automatioms are defined to ensure the performance of the aircraft by activating predetermined actions in case of failure. For example, in case of stick error, stick connection error or in case of low battery.
-
22 - Link Lost to APP
When the aircraft is in one of the flight phases (Loiter, Hover, Hold, Cruise, Climb, Approach, Return Home or Take-off), with a control mix value greater than 0.9 and loses radio connection for 2 seconds, it automatically switches to the Approach (APP) phase.

-
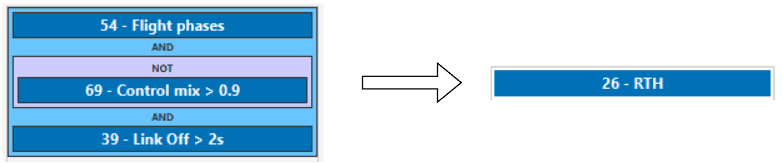
36 - Link Lost to RTH
When the aircraft is in one of the flight phases (Loiter, Hover, Hold, Cruise, Climb, Approach, Return Home or Take-off), with a control mix value less than 0.9 and loses radio connection for 2 seconds, it automatically switches to the RTH phase.
-
21 - Stick error to Auto
The autopilot switches to auto mode when Stick error bit is false.

-
40 - Battery Low to RTH
When the battery drops below a certain value, in this case 21.7 V, and the aircraft is in one of the flight phases (Loiter, Hover, Hold, Cruise, Climb, Approach, Return Home or Take-off), the autopilot will automatically guide the aircraft to RTH phase.

Stick
The following automations change the flight mode depending on the stick position, for this the Stick-mode and Stick-Manual variables are used.
Note
- Stick-mode: 3 positions (0; 0.5; 1)
- Stick-manual: 2 positions (0; 1)
-
42 - Trim stick

-
19 - Auto
The autopilot switches to Auto mode when the Stick-mode variable has a value of 0 and the Stick-manual variable has a value of 0.

-
28 - Arcade
The autopilot switches to Arcade mode when the Stick-mode variable has a value of 0.5 and the Stick-manual variable has a value of 0.

-
20 - Semi-Arcade
The autopilot switches to Semi-Arcade mode when the Stick-mode variable has a value of 1 and the Stick-manual variable has a value of 0.

-
10 - Manual
The autopilot switches to Manual mode when the Stick-manual variable has a value of 1.

Transitions
-
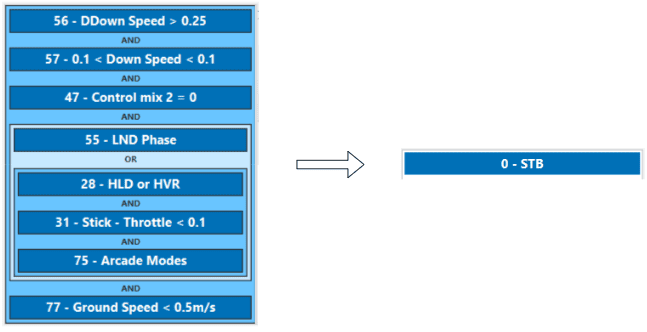
33 - LND to STB
This automation is complex due to the number of events that must be triggered for the aircraft to automatically transition from the Landing phase to the Standby phase:
- The aircraft must be on the ground, which means that the Down Speed is zero (event 57) as well as have a speed with respect to the ground that allows it to stop safely (event 77).
- While in Landing phase, the Desired Down Speed (DDown Speed) must have a value greater than 0 (event 56).
- The aircraft must be in quadcopter flight configuration (event 47).
- The aircraft must be in the Landing phase or in the Hold or Hover phases, in arcade mode and with a value of 0 in the Stick-throttle command.
-
31 - TKO to HOV
The following automation indicates the height above ground level at which the aircraft passes from Take-off to the Hover phase.

-
23 - Loiter HERE
With this automation, the aircraft performs a Loiter around the point where it transitions to the Loiter phase.

-
26 - Hover HERE
The aircraft performs the Hover actuation at the point where it transitions to the Hover phase.

-
15 - APP to HOV
In the Approach phase, if the airspeed is less than 7 m/s, the aircraft will move to the Hover phase at that point. This automation is used to perform a Hover over the defined Home point.

-
30 - RTH to LND Link Off
If Hover is performed at the defined Home point and the connection is lost for 1 minute, Autopilot 1x transitions to the Landing phase.

-
37 - RTH to LND Link Ok
When the aircraft performs a Hover over the Home point for more than 20 seconds without losing connection, it automatically transitions to the Landing phase.

Phase Buttons
The following automations are defined for entering and transitioning between flight phases in Veronte Ops. These actions are triggered by buttons that will appear in the Veronte Panel.
For some of these automations it will only be necessary to "slide" the button to trigger the flight phase change action, however, for others it will be necessary that some additional event is fulfilled to trigger the phase change.
Note
For more information on the possible flight phases, visit Phases definition - Modes & Phases section of this manual.
-
17 - FCC Button.
To start the Flight Control Check (FCC) phase, in addition to pressing the FCC Button, Autopilot 1x must be in STB phase and the stick pilot must command the 1x.

This flight phase is only performed in FW flight configuration, so the Stick - Transition variable that defines the configuration in which the aircraft flies must be greater than 0.8. This is because this variable is 0 when the configuration is quadcopter and 1 when the configuration is FW.
-
1 - ARM Button.
To switch to Armed (ARM) phase, the ARM Button must be pressed, the autopilot must be in STB phase and the Down speed must be around 0.

-
13 - RTH Button.
To switch to RTH phase, the RTH Button must be pressed, RTH allowed bit must be true (when the autopilot can guide the platform to a defined Home point) and the autopilot must be in one of the flight phases that allows it to switch to RTH (HOV, APP, LOI, CRUISE, HLD).

Transitions table
The following table shows the different possibilities for a transition between two flight phases.
© 2025 Embention. All rights reserved.