Positions blocks
Position blocks allow to operate with position variables.
Note
In 1x PDI Builder, position variables are also refered to as Features. These features variables are composed as follows:
| Type | Name | Content | Range |
|---|---|---|---|
| Float64 | latitude | Latitude component scaled as 10-7 degrees (centimeter-level precision on the surface of the Earth) | [–90, 90] * 10-7 scaled degrees |
| Float64 | longitude | Longitude component scaled as 10-7 degrees (centimeter-level precision on the surface of the Earth) | [–180, 180] * 10-7 scaled degrees |
| Float64 | height | Height above the WGS84 ellipsoid in millimeters | – |
Constant Position
Constant Position block defines a position on Earth using Latitude, Longitude and WGS84 Height.
-
Output
 Pin 0: Output of the configured position.
Pin 0: Output of the configured position. -
Configuration menu:
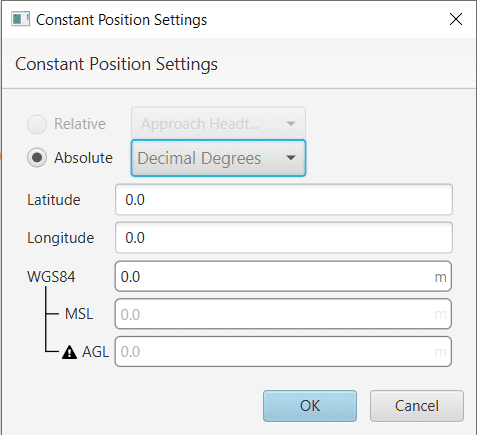
Constant Position block configuration The following parameters must be configured to define the desired absolute position:
- The coordinates can be set in UTM, MGRS (Military Grid Reference System), Decimal Degrees or Degress º ' ".
- They are indicated through the latitude, longitude and altitude.
- WGS84: The first time, the altitude must be defined with respect to the ellipsoid, WGS84. After this, MSL and AGL values will be calculated automatically and the user will also be able to define the altitude with respecto to the sea level, MSL.
LLH to position
LLH to position block is used to cast three high-precision (64-bit) variables—longitude, latitude, and WGS84 height—into a single position data structure.
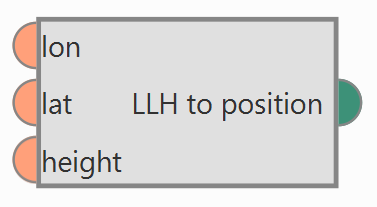
This block consolidates individual geographic coordinates into a unified position format used by other navigation and guidance components within the autopilot.
- Inputs
![]() lon: Longitude in radians.
lon: Longitude in radians.
![]() lat: Latitude in radians.
lat: Latitude in radians.
![]() height: WGS84 height in meters.
height: WGS84 height in meters.
- Output
![]() Pin 0: Position.
Pin 0: Position.
Move
Move block outputs the position which is the result of moving the input position with the displacement of the input vector.
-
Inputs
Pin 0: Input position. Pin 1: Input displacement vector in NED frame. It must be a vector of 3 elements, i.e. a 3x1 vector.
Pin 1: Input displacement vector in NED frame. It must be a vector of 3 elements, i.e. a 3x1 vector. -
Output
Pin 0: Output position.
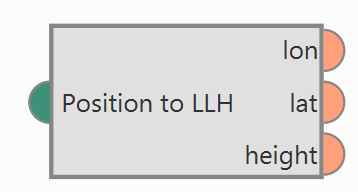
Position to LLH
Position to LLH block is designed to deconstruct a unified position data structure into its three constituent high-precision (64-bit) variables: longitude, latitude, and WGS84 height.
- Input
![]() Pin 0: Position.
Pin 0: Position.
- Outputs
![]() lon: Longitude in radians.
lon: Longitude in radians.
![]() lat: Latitude in radians.
lat: Latitude in radians.
![]() height: WGS84 height expressed in meters.
height: WGS84 height expressed in meters.
Read Feature
Read Feature block reads a position from a FID (feature) variable.
-
Outputs
Pin 0: Position to read. Pin 1: Enabled/disabled status: true for non operation features, falsa in operation features if they are not set to any value.
Pin 1: Enabled/disabled status: true for non operation features, falsa in operation features if they are not set to any value. -
Configuration menu:
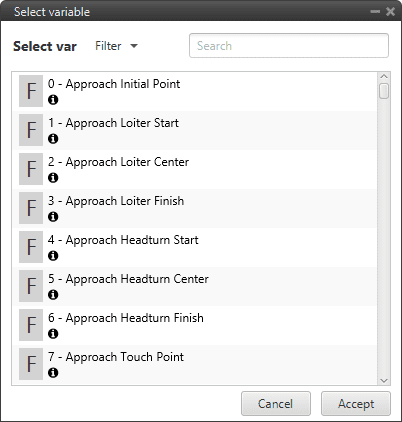
Read Feature block configuration Users must select the feature variable where the position is stored.
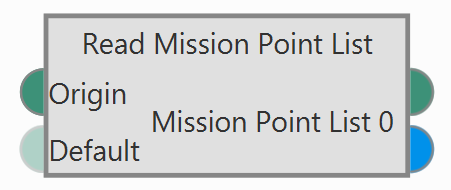
Read Mission Point List
Read Mission Point List block functions as a position reader within an operation group. It is designed to return the position from a selected operation feature group that is closest to a given reference point.
- Inputs
![]() Origin: Reference position to compute distance.
Origin: Reference position to compute distance.
![]() Default: Default position (optional).
Default: Default position (optional).
- Outputs
![]() Pin 0: Closest position to the reference (3D distance).
Pin 0: Closest position to the reference (3D distance).
![]() Pin 1: Validity flag, it is set to false when the output position is not valid, for example when the group is empty or has no valid features if there is no default position connected.
Pin 1: Validity flag, it is set to false when the output position is not valid, for example when the group is empty or has no valid features if there is no default position connected.
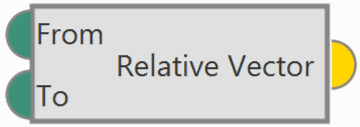
Relative Vector
Relative Vector block calculates the relative vector in NED frame from the two input positions.
-
Inputs
From: First position. To: Second position. -
Output
Vector: Distance vector from the first position to the second position.
Write Feature
Write Feature block writes a position to a FID variable.
-
Input
Pin 0: Position to write. -
Configuration menu:
Write Feature block configuration Users must select the feature variable where the position is to be stored.
© 2026 Embention. All rights reserved.